串联机构

串联机器人的基本结构形式结构简图和工作空间
图片尺寸1027x638
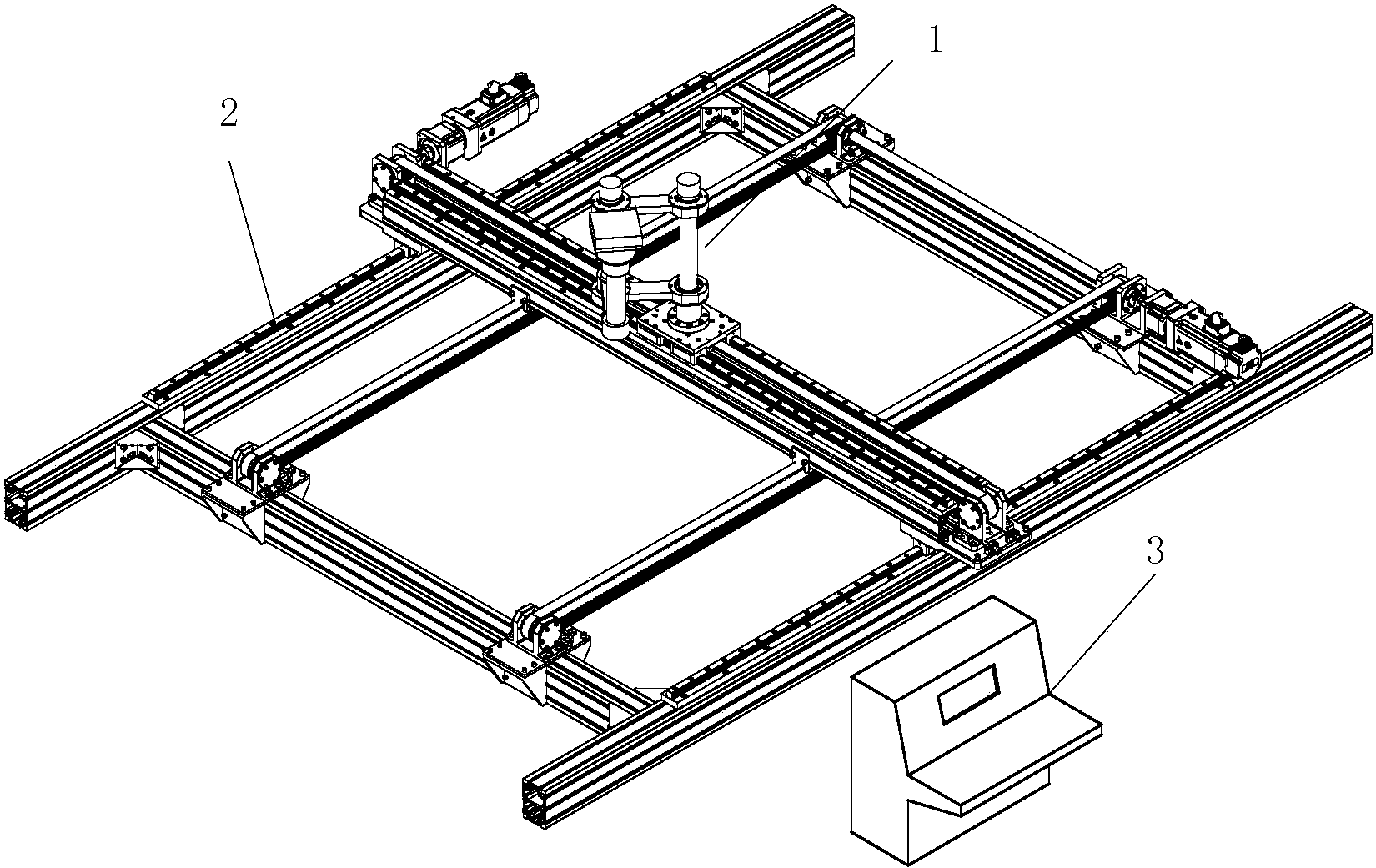
串并联提升机构
图片尺寸820x711
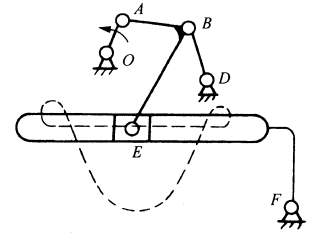
图1所示是一个输出构件具有间歇运动特性的串联组合机构前置机构为
图片尺寸319x236
串联机器人以开环机构为机器人机构原型;并联机器人为有一个或几个
图片尺寸397x305
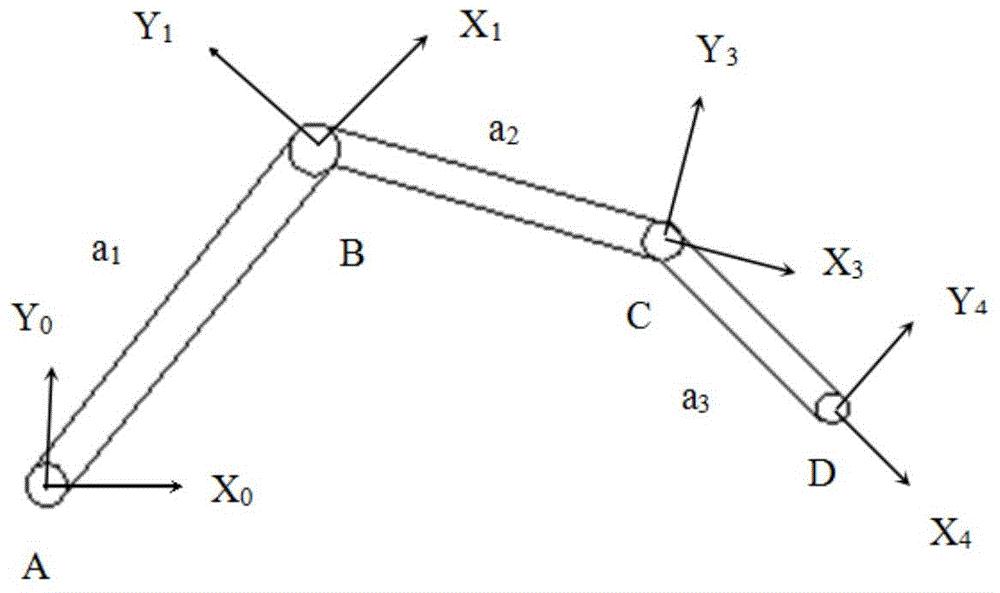
cn105302147b_一种串联机构轨迹规划方法有效
图片尺寸1000x593
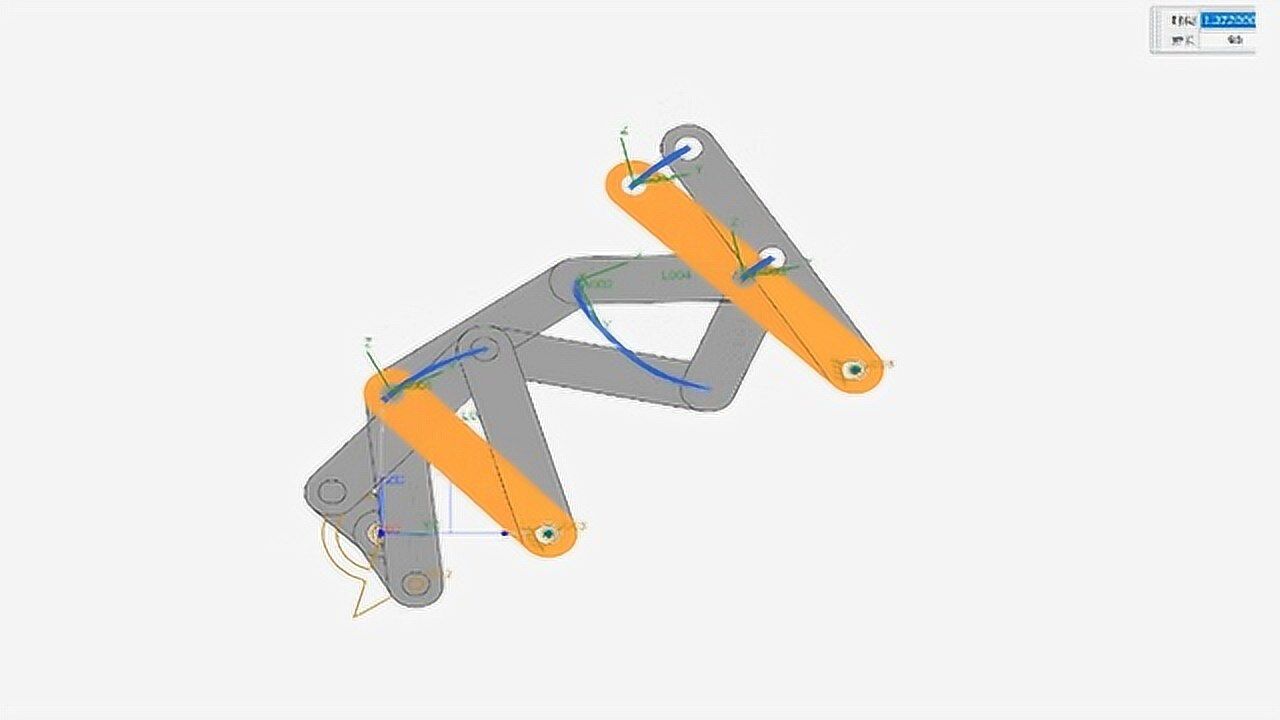
连杆机构,连杆机构串联
图片尺寸1280x720
一种旋转型串联弹性驱动机构
图片尺寸428x444
串联移动机构
图片尺寸820x778
工业串联机器人关节刚度系数辨识方法与流程
图片尺寸1000x656
串联连杆机构复合高可靠性的装载机制造技术
图片尺寸1000x572
cn101181913a_串联式模块化爬壁机器人失效
图片尺寸1960x1577
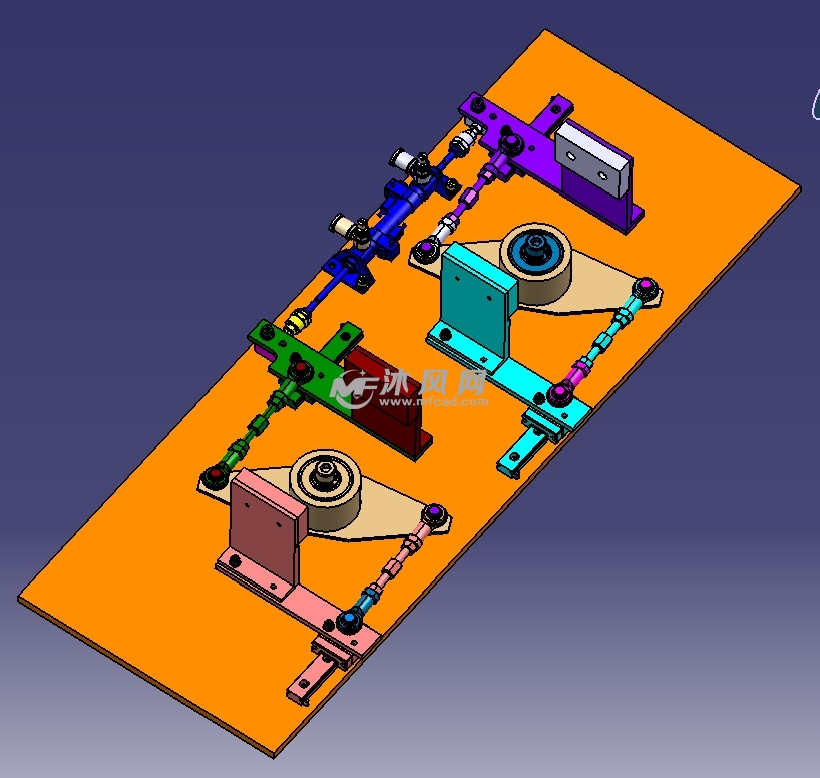
串联可组态式同步进给驱动机构制造技术
图片尺寸1000x718
变胞并联机构的制作方法
图片尺寸880x1000
来一波儿机械基础动画,机械人的最爱!_机构
图片尺寸519x354
cn102180098a_串联式发电机组失效
图片尺寸2364x1064
五轴串联机器人模型
图片尺寸820x469
五轴串联机器人模型
图片尺寸820x469
基于串联双杆机构的低干扰力支撑式平面位置随动跟踪系统
图片尺寸1650x1041
背景技术:如今广泛使用的工业机器人大都是串联机器人,但是由于串联
图片尺寸546x422
人们熟知的关节型工业机器人在机械机构上为串联连接方式,属于串联
图片尺寸640x427