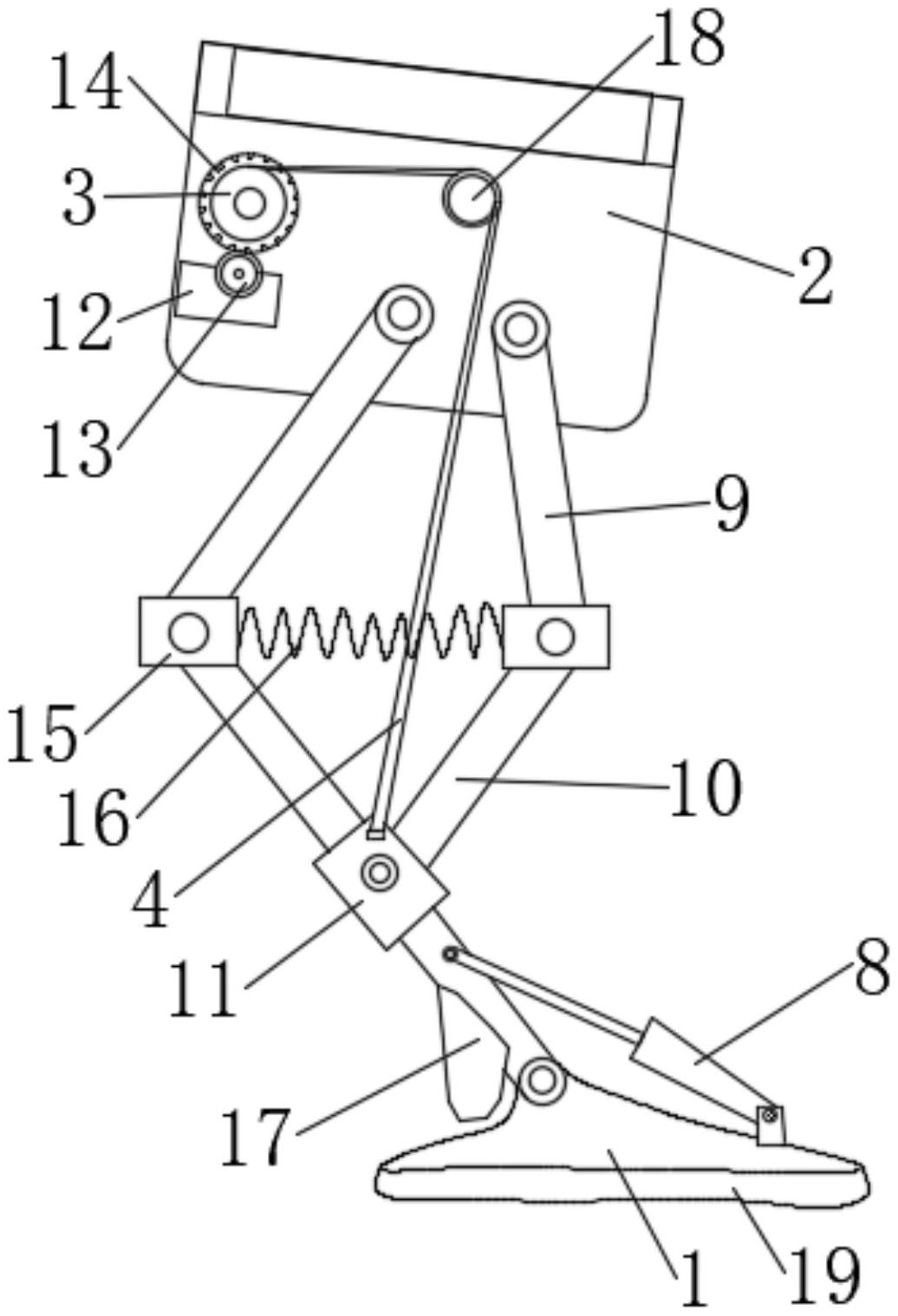
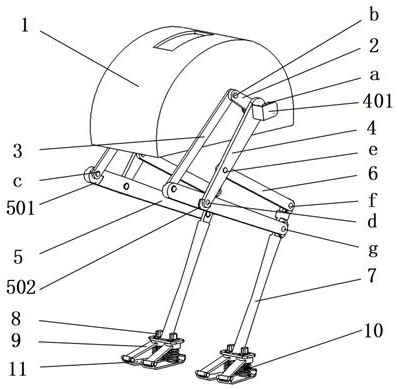
仿生腿机构简图

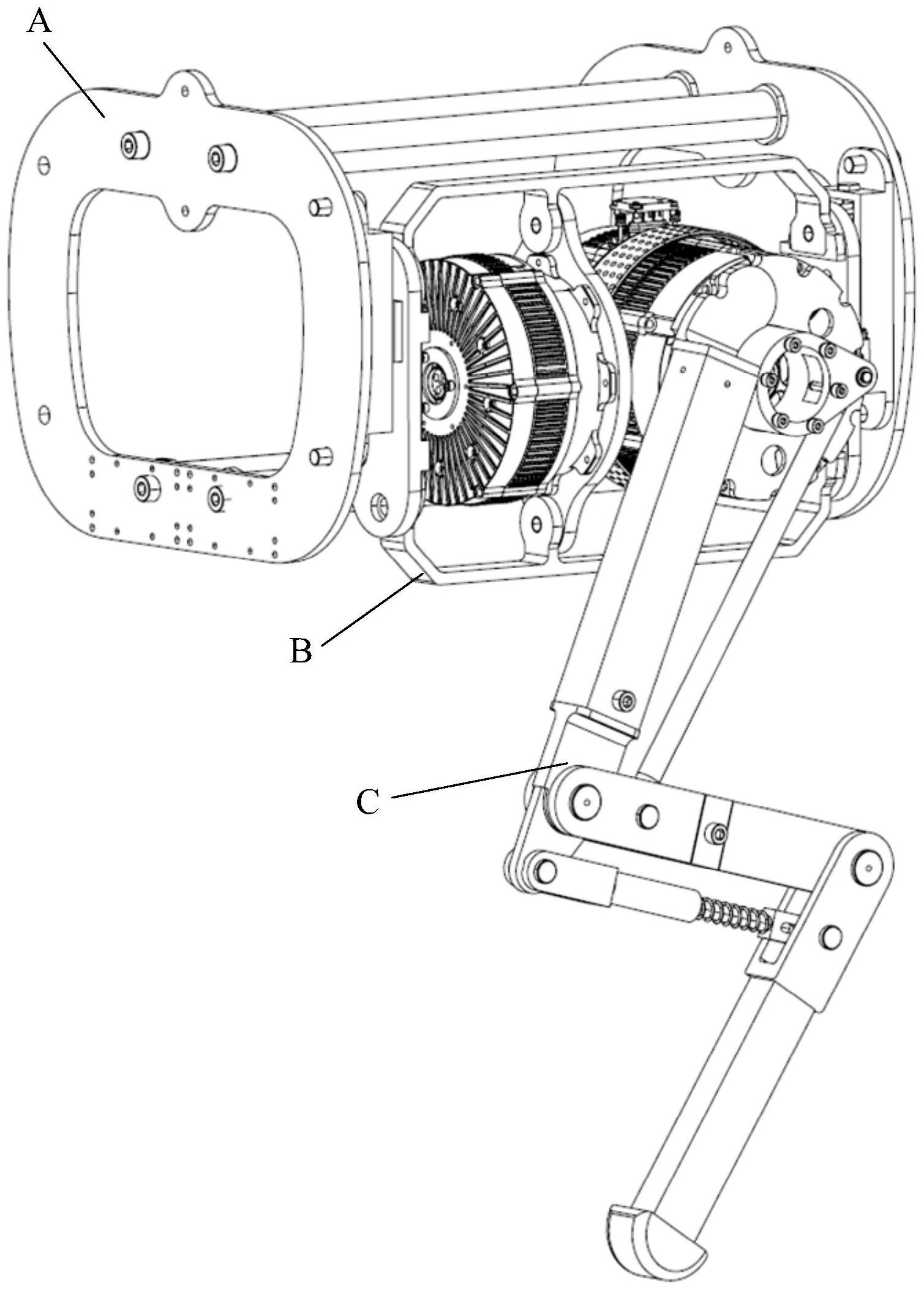
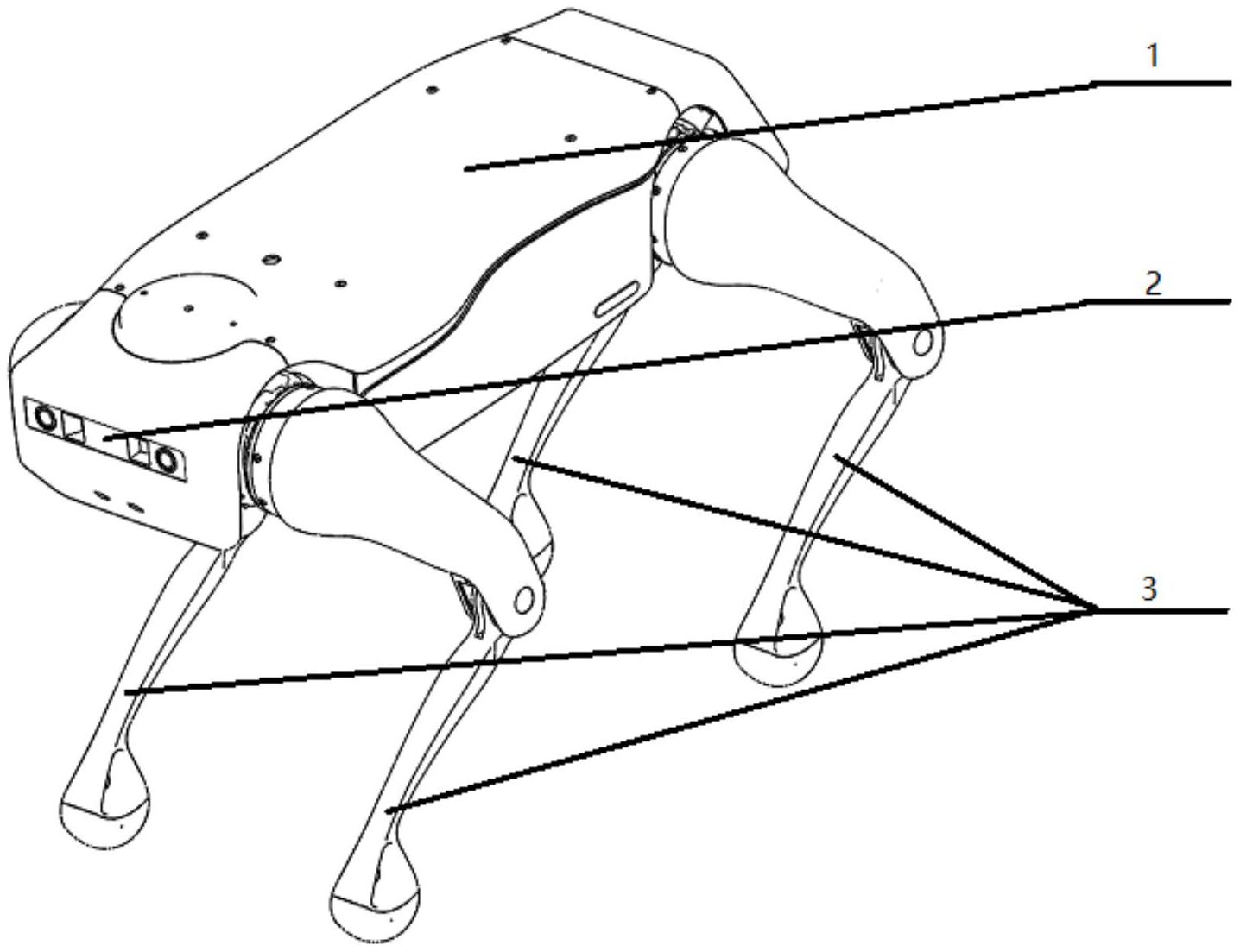
一种四足机器人仿生腿部机构
图片尺寸1509x2107
一种仿生青蛙机器人腿部结构-爱企查
图片尺寸1036x1519
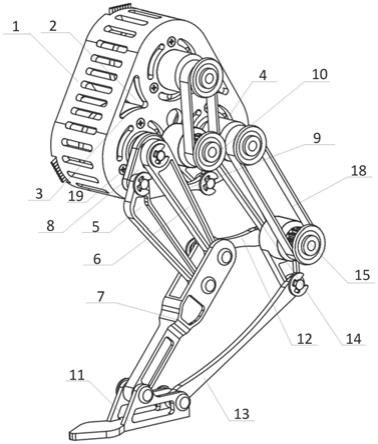
一种仿生机器人腿足机构的制作方法
图片尺寸378x444
一种四足机器人仿生腿部机构的制作方法
图片尺寸716x1000
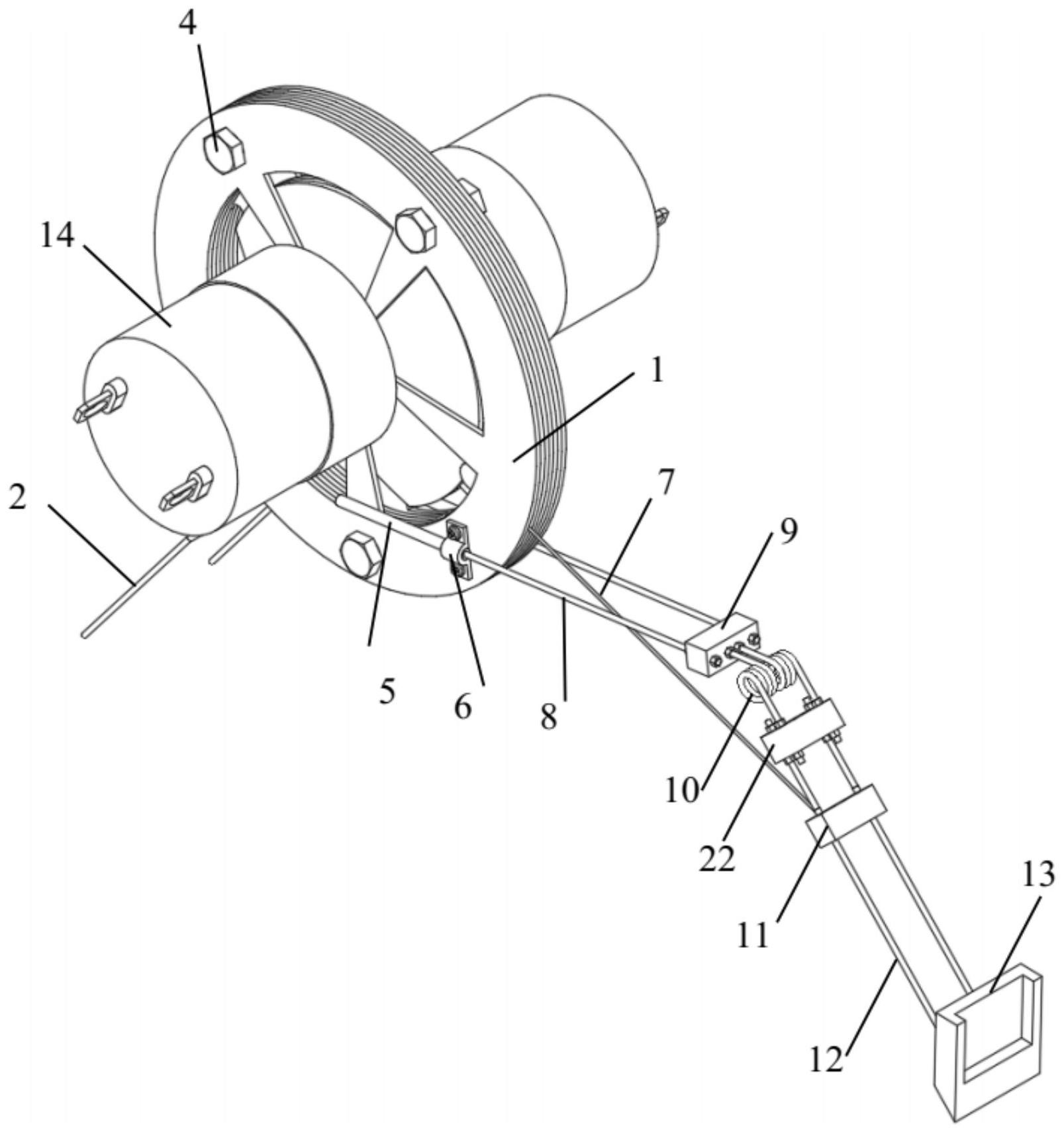
一种腿足式机器人的腿部动力系统机构及腿足式机器人的制作方法
图片尺寸943x1000
仿生机器人发展研究
图片尺寸430x356
一种四足仿生机器人单腿机构的制作方法
图片尺寸788x1000
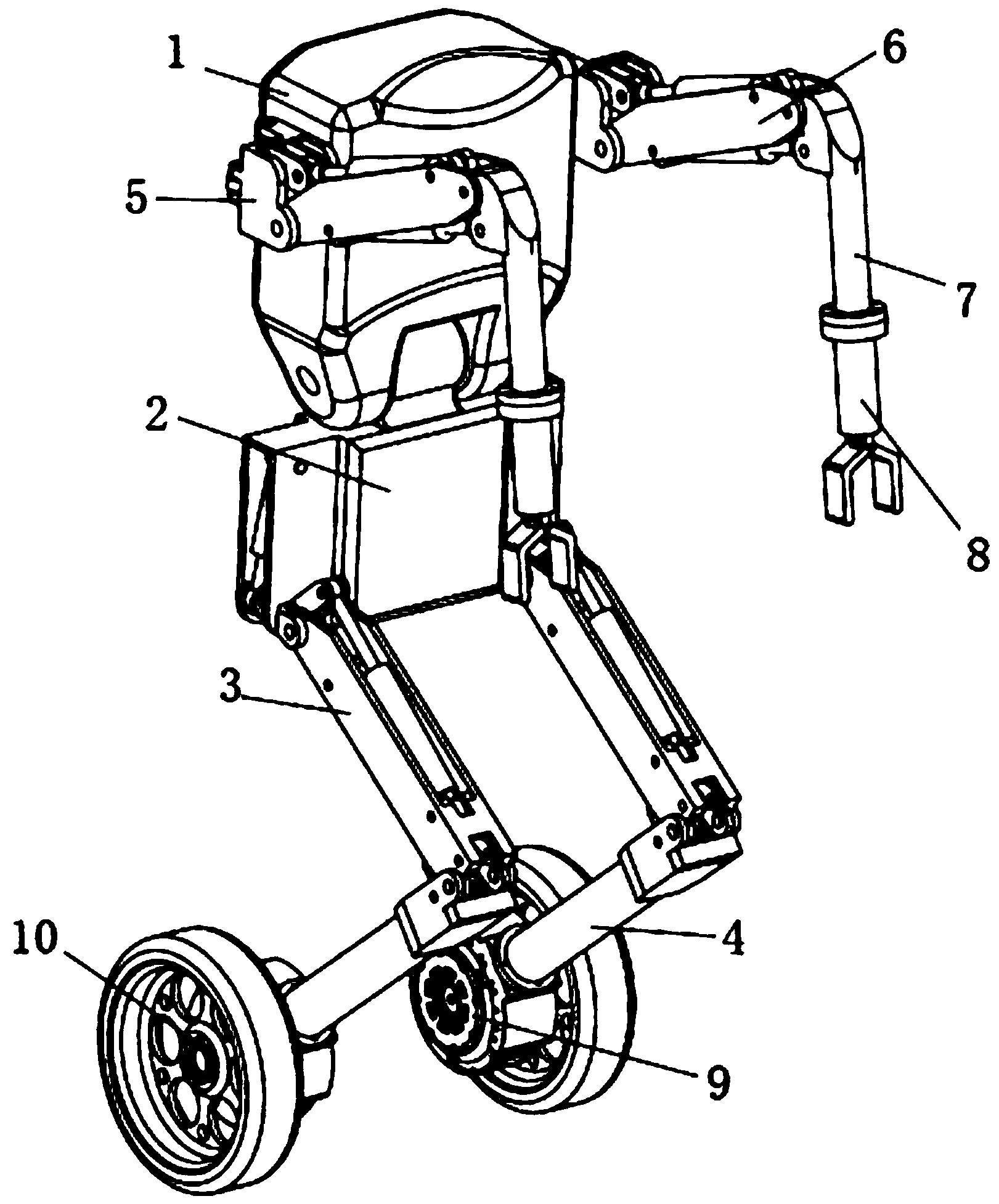
一种双腿双轮复合运动机器人
图片尺寸1621x1954
仿鸵鸟后肢运动功能特性的节能步行腿机构制造技术
图片尺寸558x561
仿真青蛙后退腿机构的制作方法
图片尺寸1000x899
一种多连杆仿生机械腿及爬行机器人的制作方法
图片尺寸816x1000
cn106005079b_带主动脚踝关节与仿生足部的单腿机器人跳跃机构有效
图片尺寸1505x2198
四足仿生机器人腿
图片尺寸921x1000
一种仿生机械腿及仿生机器人
图片尺寸401x1000
腿模组及四足仿生机器人
图片尺寸1436x1103
一种仿真机器人腿部结构的制作方法
图片尺寸599x1000
cn103723208a_一种仿人腿机器人行走机构失效
图片尺寸1000x866
功能的仿生双足行走机器人,由机身,冠状面摆动机构和两条机械腿组成
图片尺寸398x389
本发明属于仿生机器人领域,更具体地,涉及一种仿鸵鸟后肢机械腿.
图片尺寸549x565
一种仿蝗虫跳跃机器人后腿机构
图片尺寸1607x1710








猜你喜欢:机构简图结构图仿生机械鱼结构简图仿生机构机械腿仿生内燃机机构简图缝纫机机构运动简图机构简图机构运动简图鄂破式破碎机机构简图智能仿生腿剪床机构运动简图凸轮机构简图仿生构成平面机构运动简图制动机构运动简图机构运动简图例题齿轮摆杆机构结构简图机构运动简图画法转动导杆泵机构简图铆钉机构运动简图仿生鱼结构仿生机器鱼零件图齿轮机构运动简图仿生机械设计仿生机械仿生鱼图纸仿生机器鱼装配图仿生机器狗设计图牛头刨床机构简图机构运动简图的测绘刘文正个人资料简介蓝宝石婚图片16年小欢喜小金扮演者防晒脖套流浪地球乐高积木售罄是什么意思墨镜ps皮脂腺囊肿图片和症状爸爸的职业画画休闲图片 垂钓网红丑男抖音高中历史教科书人教版