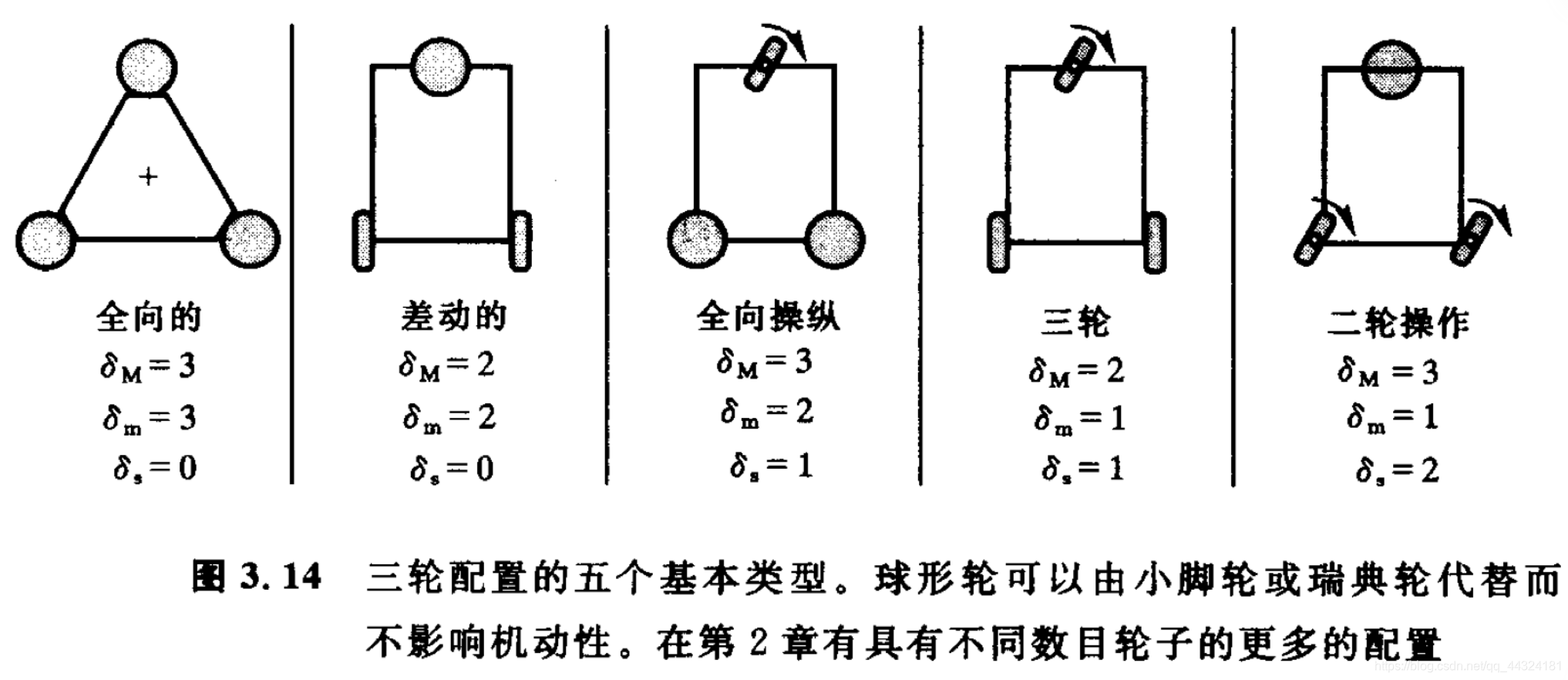
全向轮运动控制原理图

轮轴,辊轴和地面接触点 地面接触点,底盘平面上自由运动 全向轮和麦轮
图片尺寸2034x882
关于一种全向轮式的机器人运动控制方式的研究与实现
图片尺寸499x298
一种电动汽车四轮转向系统及控制方法与流程
图片尺寸484x227麦克纳姆全向轮_solidedge
图片尺寸553x211
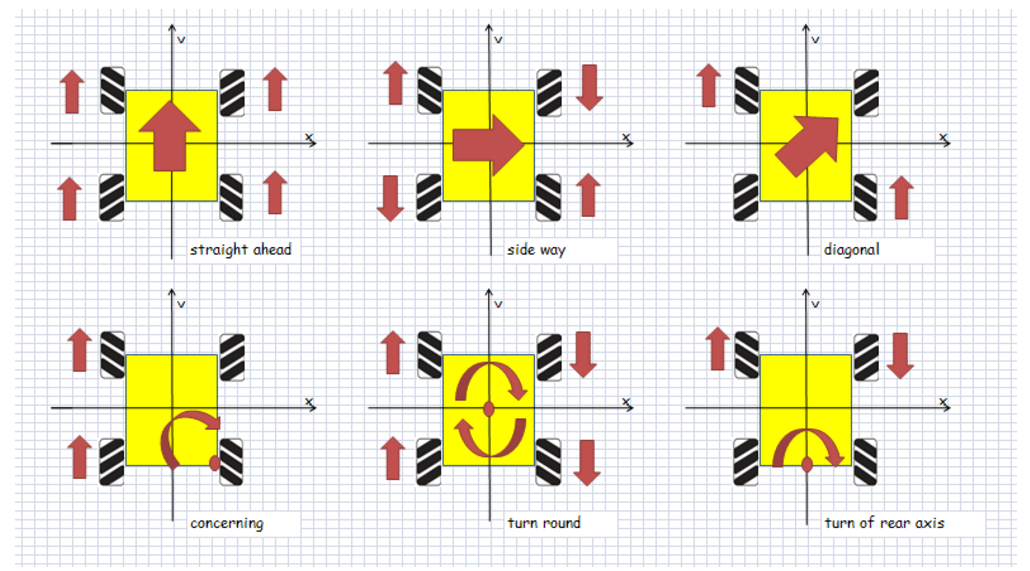
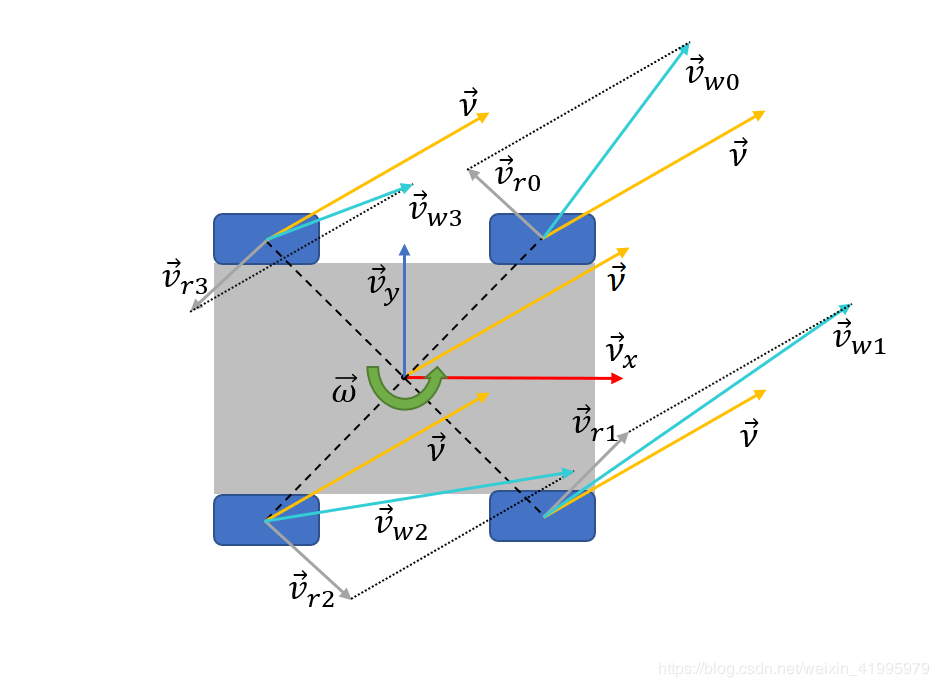
麦克纳姆轮全向移动原理
图片尺寸854x515
全向轮运动学与vrep中全向移动机器人仿真
图片尺寸650x298
motec麦克纳姆全向车控制平台
图片尺寸587x289
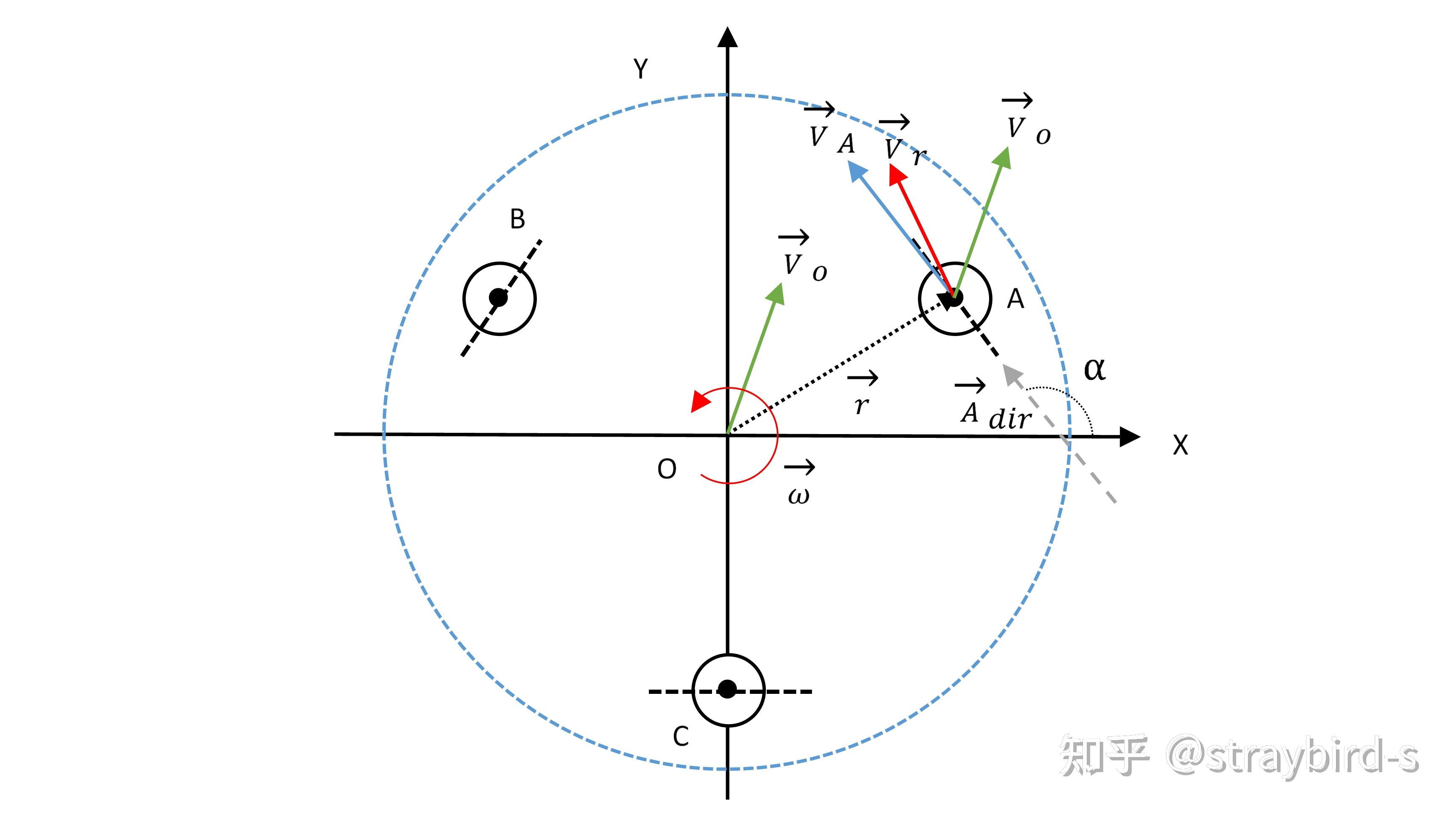
一种基于全向车绕任意点定轴转动的控制方法及系统技术方案
图片尺寸717x1000
一种教学用四轮月球车运动控制系统技术方案,四轮全向轮运动控制专利
图片尺寸1000x697
全向轮运动学与vrep中全向移动机器人仿真
图片尺寸1030x571
尤其涉及一种使用麦克纳姆轮式底盘的运动避障装置及控制方法
图片尺寸1000x917
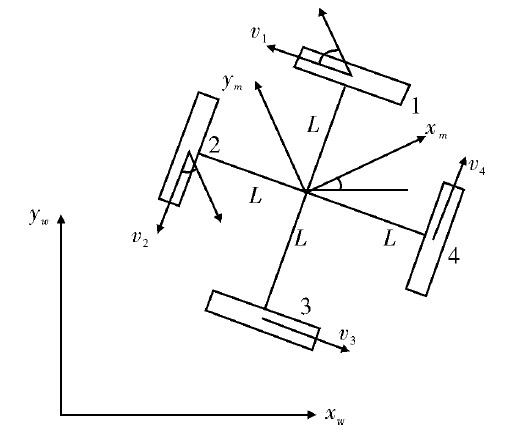
全向轮作为驱动轮,它们之间间隔90°均匀分布,如图1 所示,其简化运动
图片尺寸521x446
全向agv移动平台
图片尺寸600x377
浅谈麦克纳姆轮全向移动平台之运动学
图片尺寸939x687
机器人开发平台fibot具备感知,视觉,定位及导航,动作控制等底层能力
图片尺寸689x378
全向轮的制作方法
图片尺寸740x1000
车轮为60mm大小的全向轮,能实现全向移动
图片尺寸1056x374
赫曼全新一代aeca系列伺服控制全向行走无线遥控智能顶升机_新浪新闻
图片尺寸600x360
图3.3 全向轮运动反解运动学反解给出了全向轮的速度控制方式.3.
图片尺寸3458x1950
航发机器人防爆agv 引领安全智能物流新时代|机器人
图片尺寸700x648













猜你喜欢:全向轮运动原理偏心轮运动原理图四轮全向轮运动原理偏心轴往复运动原理图原理图工作原理风塔气流运动原理图自行车运动原理图自行车单向传动原理图运动控制模块偏心轮振动原理图解运动控制偏心轮机构运动动态图原理图固高运动控制器原理图实物机器人运动控制运动控制算法永动机原理图简单原理图三菱运动控制模块运动控制系统codesys运动控制器9013引脚图和原理图偏心轮机构运动简图自行车的运动原理l298n原理图自行车轮轴原理图运动控制卡偏心轮弩原理图ad原理图军人美女早上好奇瑞a5电瓶型号图片三元合婚表九江尖沙咀酒家广西蟋蟀虫王图片女排精神漫画图片真实照片无美颜我在江南歌谱合肥罍街图片美食女生动漫头像狐狸面具口腔种植转移杆图片微分狼尾发型