六自由度坐标

思维
图片尺寸1124x631
red和facebook合作打造首款3d vr六轴相机
图片尺寸1032x683
六自由度 - csdn
图片尺寸544x268
机器人的自由度
图片尺寸700x501
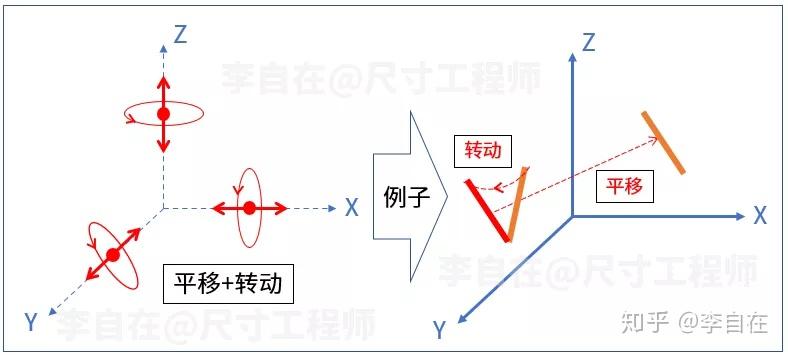
六自由度
图片尺寸788x355
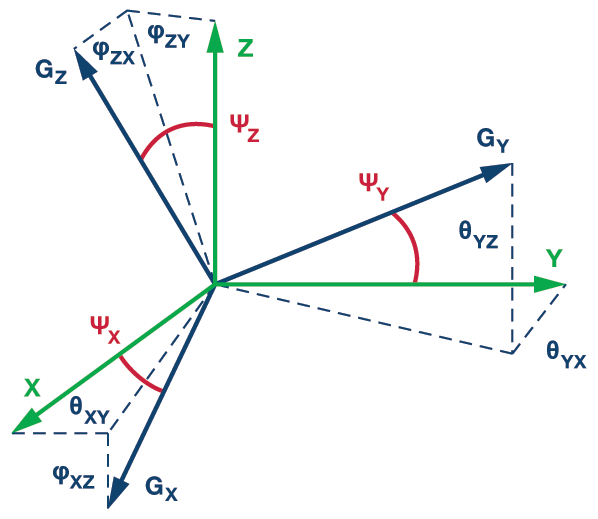
自由度 /a>,即沿x,y,z三个 a target="_blank" href="/item/直角坐标
图片尺寸196x136
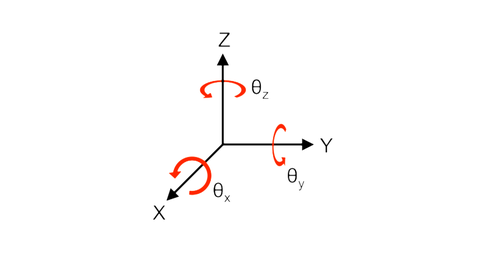
即沿x,y,z三个坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度
图片尺寸478x382
全电动多自由度仿真调姿平台,稳定平台,上海高质量有售
图片尺寸322x300
【兆恒机械】六点定位——坐标系的基础理论
图片尺寸577x615
图2-16工件的六个自由度
图片尺寸457x366
按如上步骤对六自由度机械手建立坐标系,得到如图:根据所建立的坐标系
图片尺寸554x270
一个自由的物体相对于三个相互垂直的空间坐标系,有六种活动的可能性
图片尺寸524x452![[cvpr 2019]类别级物体6自由度位姿估计](https://i.ecywang.com/upload/1/img1.baidu.com/it/u=587970934,677754606&fm=253&fmt=auto&app=138&f=PNG?w=751&h=466)
[cvpr 2019]类别级物体6自由度位姿估计
图片尺寸751x466
基本上,很多imu厂商都生造了"9自由度"一词来推销
图片尺寸598x519
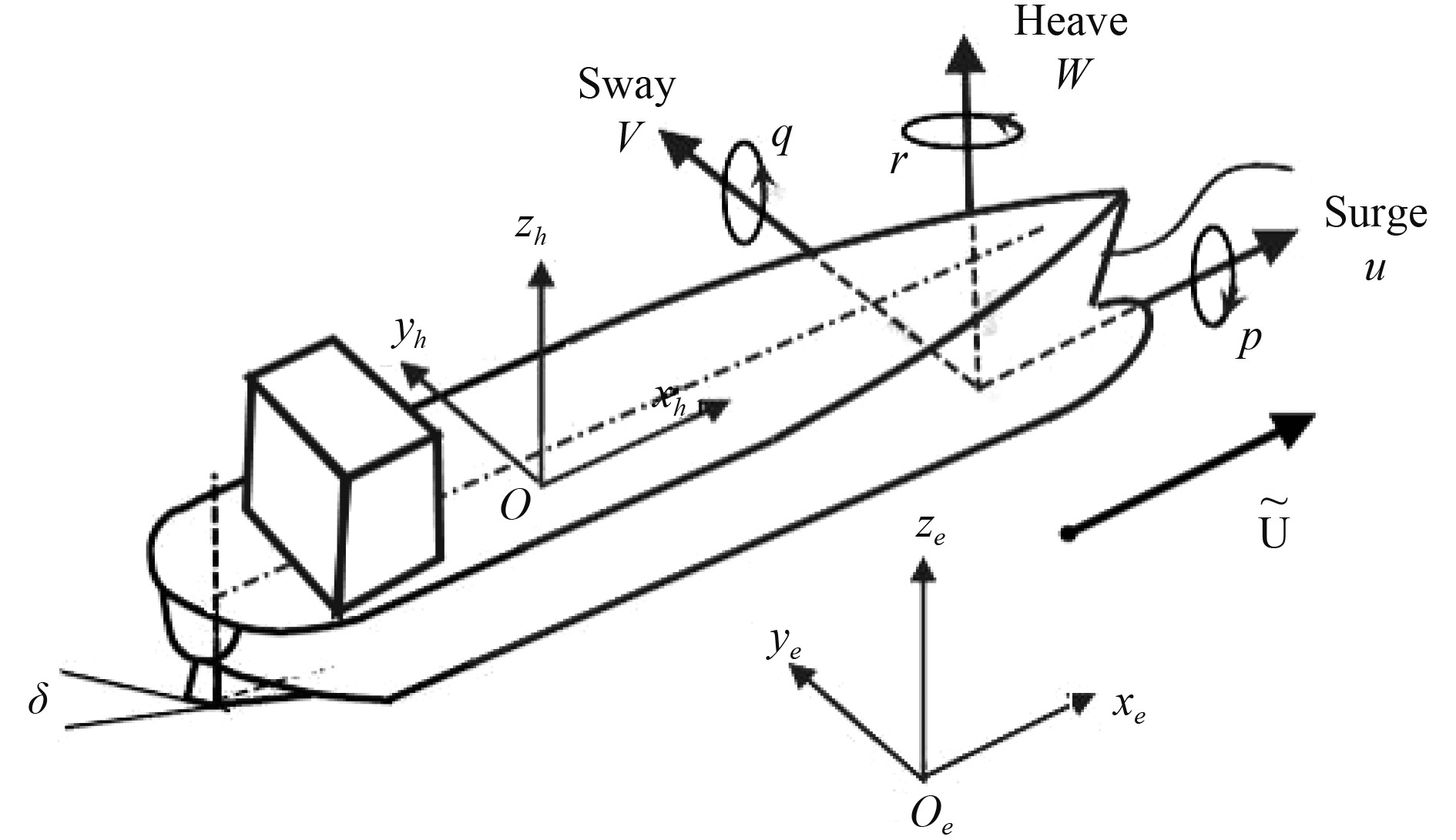
oe61xeyeze坐标系统如图1所示,其中,本文采用的六自由度弱非线性
图片尺寸1890x1091
六点定位原则及定位基准的选择
图片尺寸282x216
cn103942427a_一类六自由度机械臂运动学逆解的快速简便求法有效
图片尺寸699x1000
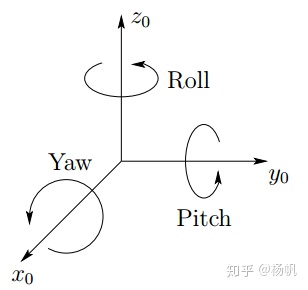
的是 roll-pitch-yaw(rpy),可以理解成绕固定坐标系的旋转变换顺序xyz
图片尺寸308x290
视图矩阵就是把世界坐标系的顶点位置转化到视点(或者说摄像机)空间的
图片尺寸459x217
1 船舶表面作业用六自由度机械臂运动坐标系5000 t以上的大型船舶
图片尺寸1417x1110









![[cvpr 2019]类别级物体6自由度位姿估计](https://img-blog.csdnimg.cn/20190902165652561.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L2xoNjQxNDQ2ODI1,size_16,color_FFFFFF,t_70#pic_center)