六足机器人机构原理图

一种采用超声波传感器和六轴传感器的六足机器人
图片尺寸584x464
cn101948011a_一种六足万向行走的多功能月球探测机器人失效
图片尺寸1808x1105
cn210149449u_一种六足机器人有效
图片尺寸1000x851
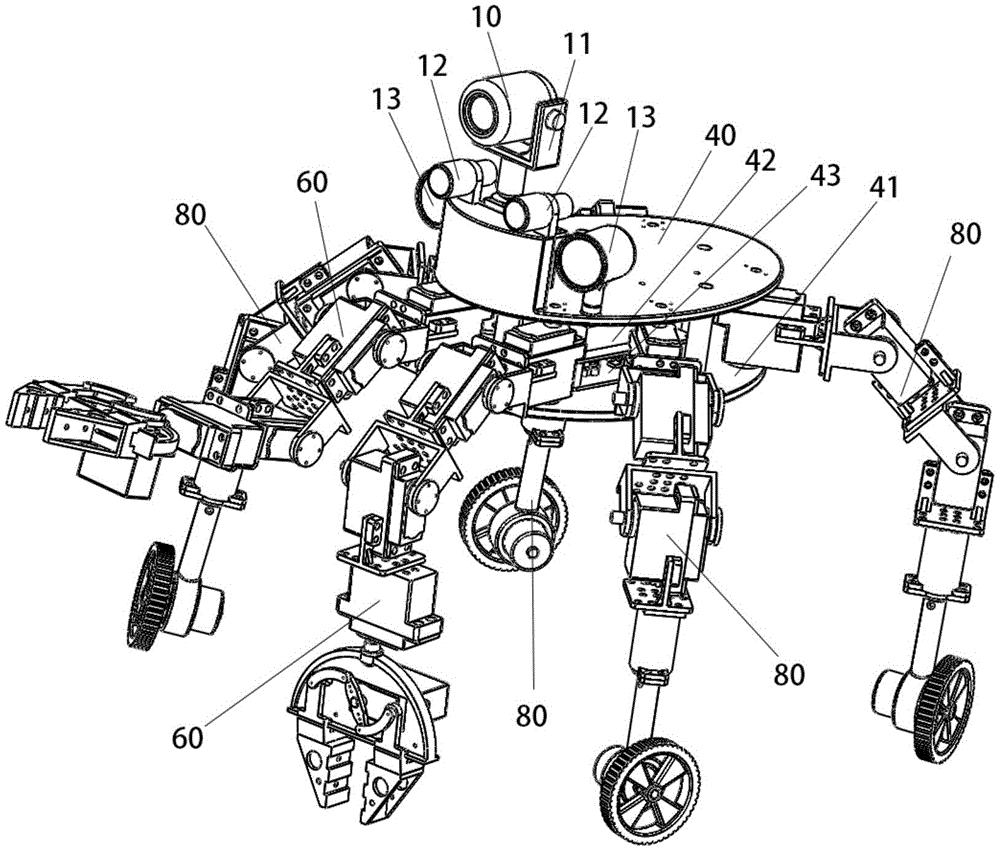
一种六足探测机器人制造技术
图片尺寸898x1000
cn209454890u_一种轮式爬行式自由切换六足机器人有效
图片尺寸1000x639
钩爪式六足爬壁机器人及其运动方法技术
图片尺寸964x1000
可升降越障的勘探六足机器人
图片尺寸1000x895
六足步行机器人毕业设计答辩(埃万斯机构).ppt
图片尺寸1152x864
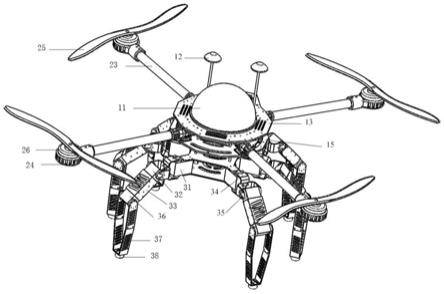
一种陆空两用六足机器人
图片尺寸444x294
六足机器人系统设计与实现.zip
图片尺寸1213x859
六足语音机器人
图片尺寸648x570
一种基于手柄的六足机器人的制作方法
图片尺寸1000x658
arduino仿生六足机器人教材
图片尺寸893x450
六足机器人:机构原理
图片尺寸854x480
六足机器人系统设计与实现
图片尺寸820x601
【六足机器人】早期金属版本早期总线小六足phoenix凤凰代码演示
图片尺寸1280x720
六足机器人水路两栖摆足
图片尺寸653x474
六足机器人
图片尺寸1065x748
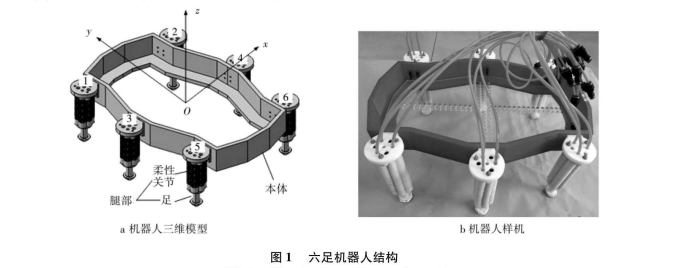
六足机器人结构与运动原理
图片尺寸679x268
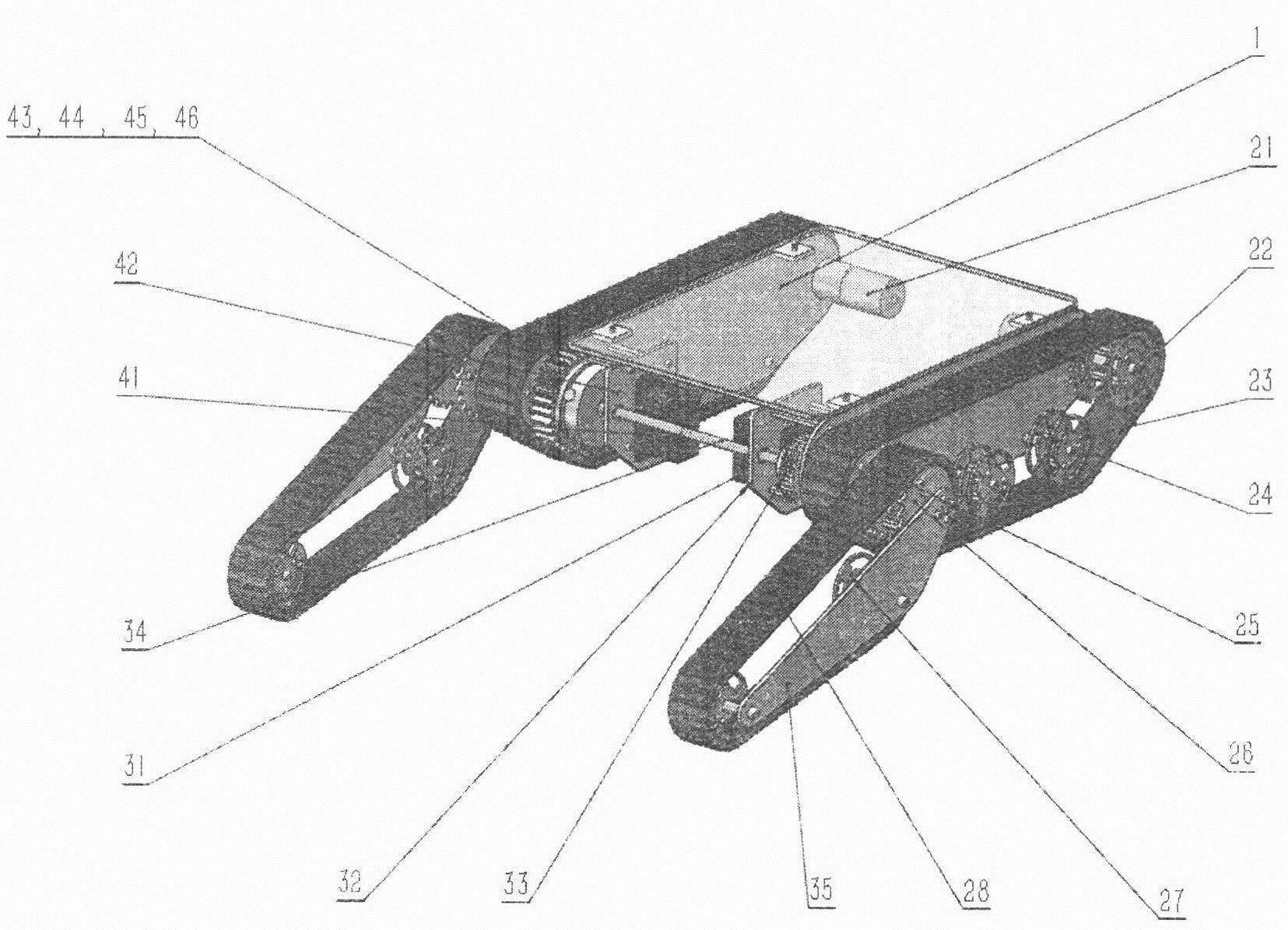
本申请公开了一种摆臂式履带机器人,包括机架,传动机构,摆臂机构和锁
图片尺寸1655x1195