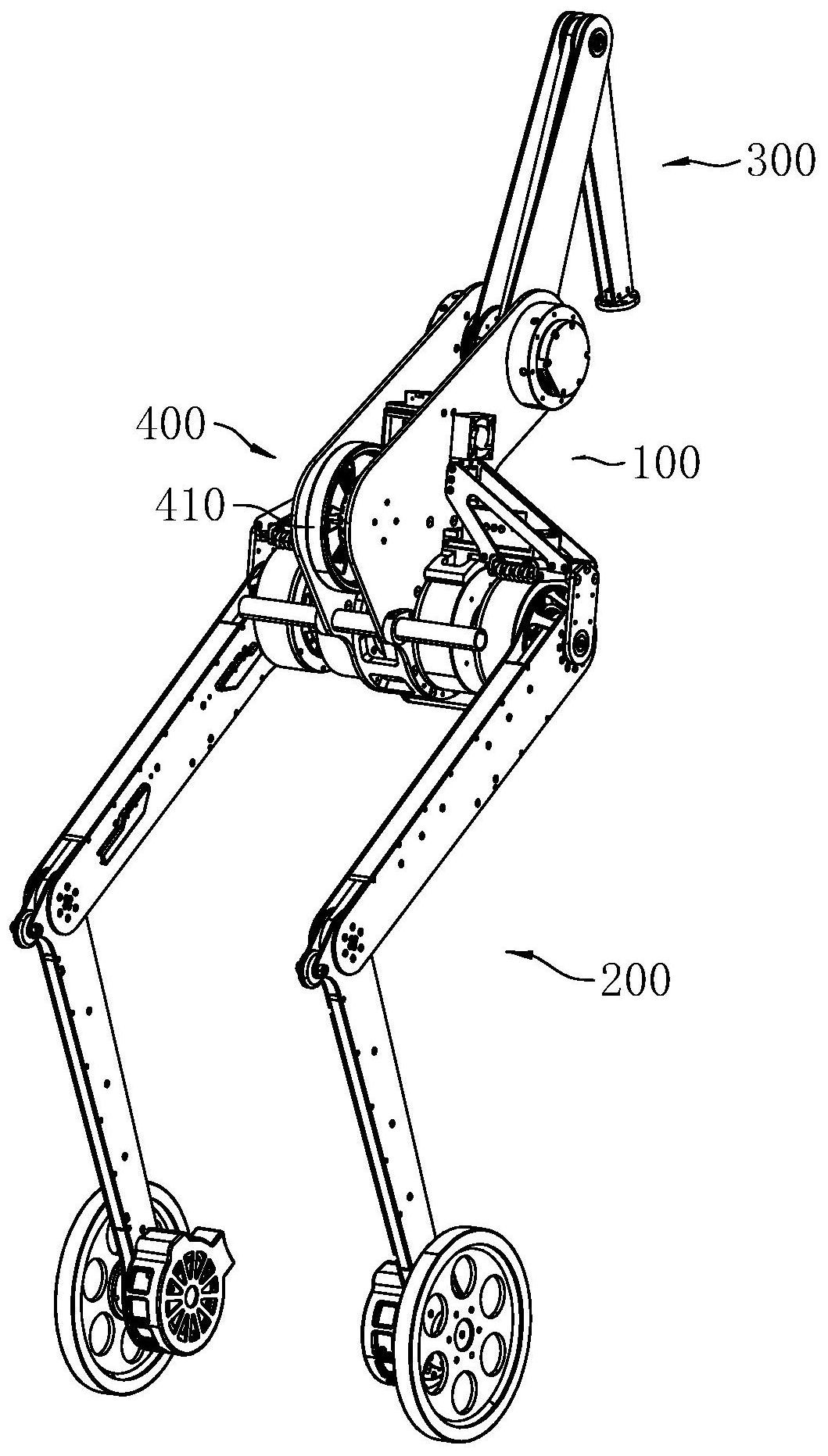
单电机双足机器人图纸

属于机器人技术领域,旨在解决现有大多数双足步行机器人行走模式单一
图片尺寸1619x2499
一种单电机双足机器人制造技术
图片尺寸815x1000
cn112776914a_双足机器人
图片尺寸1059x1863
一种双足行走机器人的制作方法
图片尺寸1000x882
一种高能效轻量化结构双足机器人的逆运动学求解方法
图片尺寸1751x1611
一种双足机器人的制作方法
图片尺寸795x1000
cn109501880a_独轮双足行走机器人
图片尺寸1741x1773
一种具有多种运动模式的可重构双足机器人的制作方法
图片尺寸882x1000
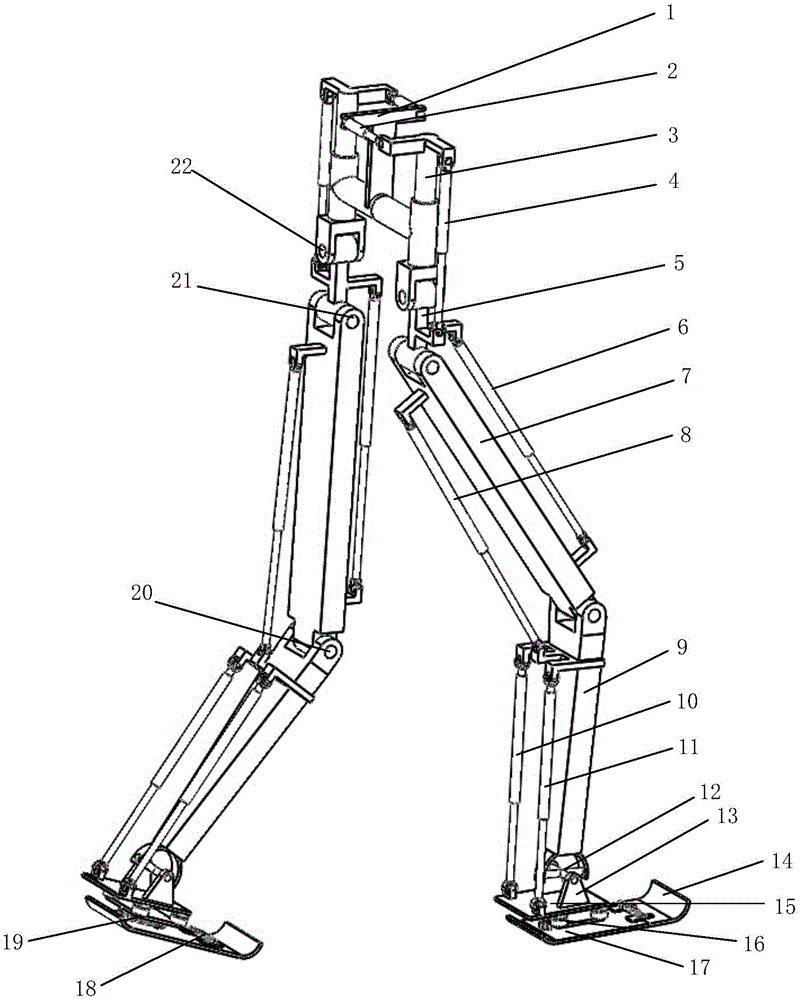
一种欠驱动液压双足机器人下肢机构的制作方法
图片尺寸799x1000
一种蜗杆传动式单电机双足机器人的设计 - 机器人模型图纸 - 沐风网
图片尺寸300x225
设计以及制作了能通过伺服电机控制运动的一种经济型的双足步行机器人
图片尺寸1150x793
cn210555244u_一种欠驱动液压双足机器人下肢机构有效
图片尺寸801x1000
双足机器人
图片尺寸776x1000
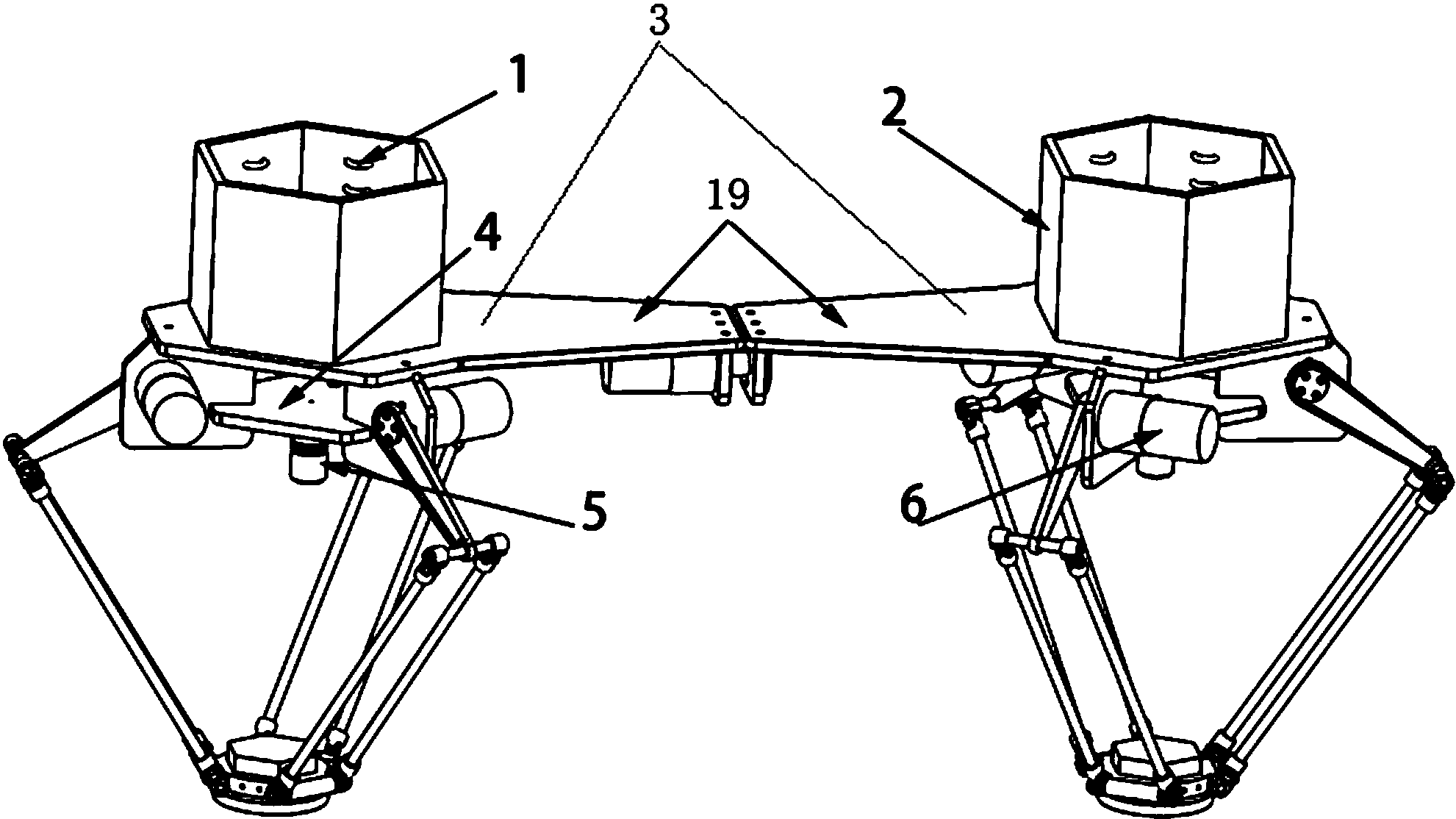
一种模块化的六自由度主动关节型双足步行机器人
图片尺寸1444x1445
一种仿人双足机器人机械结构的制作方法
图片尺寸908x1000
一种双轮足混合自平衡机器人的制作方法
图片尺寸1000x887
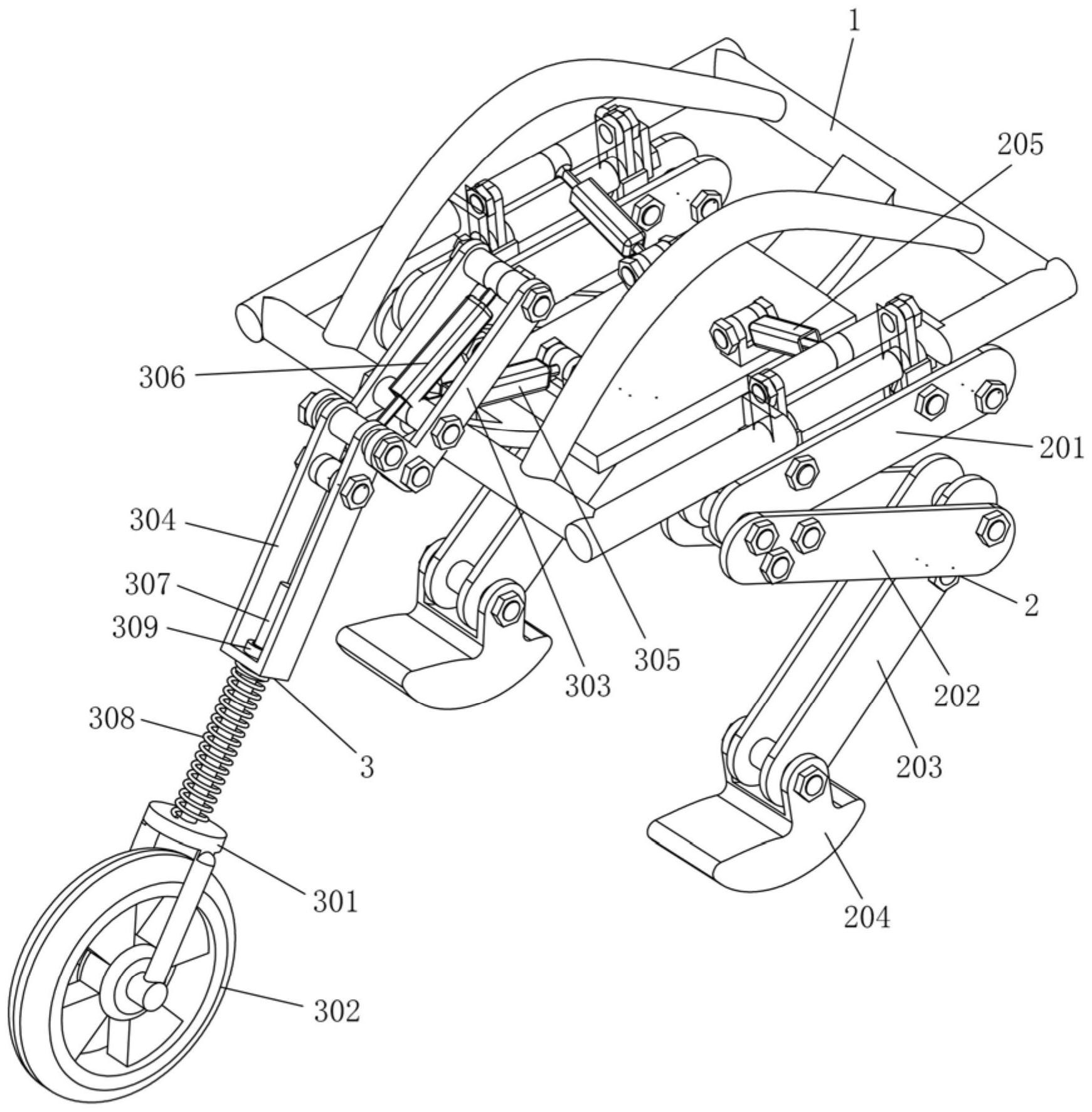
所述机器人本体包括电机驱动模块和基座,所述机器人本体上还设置有
图片尺寸1045x1019
一种双足攀爬巡检机器人
图片尺寸1981x1114
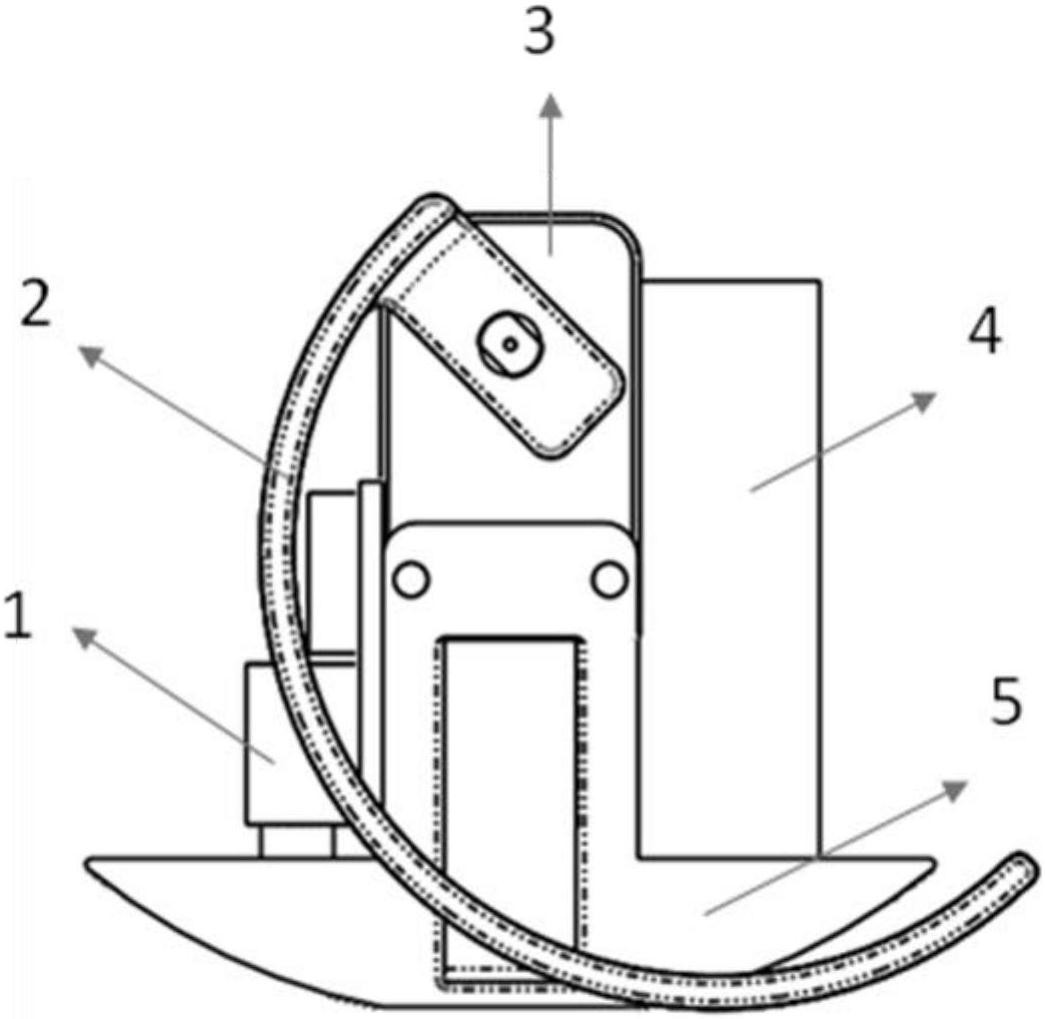
一种双足机器人的足部结构及其全地形路面适应方法
图片尺寸1956x1417
cn102131621b_用于能够乘坐的游乐设施的大型双足步行机器人和利用此
图片尺寸866x1000