双足机器人步态规划

【首发推荐】机械工程:两点式双足步行机器人步态规划方法及其实验
图片尺寸554x319
一种双足机器人爬楼梯步态规划方法,装置及机器人-爱企查
图片尺寸1690x1275
一种3d欠驱动双足机器人跳跃运动的步态规划方法
图片尺寸1510x1858
一种双足机器人爬楼梯步态规划方法,装置及机器人与流程
图片尺寸1000x754
一种双足机器人的步态规划研究
图片尺寸826x691
一种双足步行机器人的步态规划方法
图片尺寸1664x2338
一种3d欠驱动双足机器人跳跃运动的步态规划方法技术
图片尺寸677x1000
一种用于双足步行机器人的步行运动规划方法与流程
图片尺寸579x526
双足步行机器人的步态规划
图片尺寸1664x2338
双足机器人空间域步态规划与控制方法
图片尺寸444x201
一种双足机器人斜面行走的步态规划方法技术
图片尺寸1000x816
v仿人双足机器人上楼梯轨迹规划及实现
图片尺寸600x506
小型双足人形机器人机构设计步态规划.pdf
图片尺寸792x1121
机器人控制器行业研究:人形机器人行动之脑,全球本体厂商必争之地
图片尺寸640x412
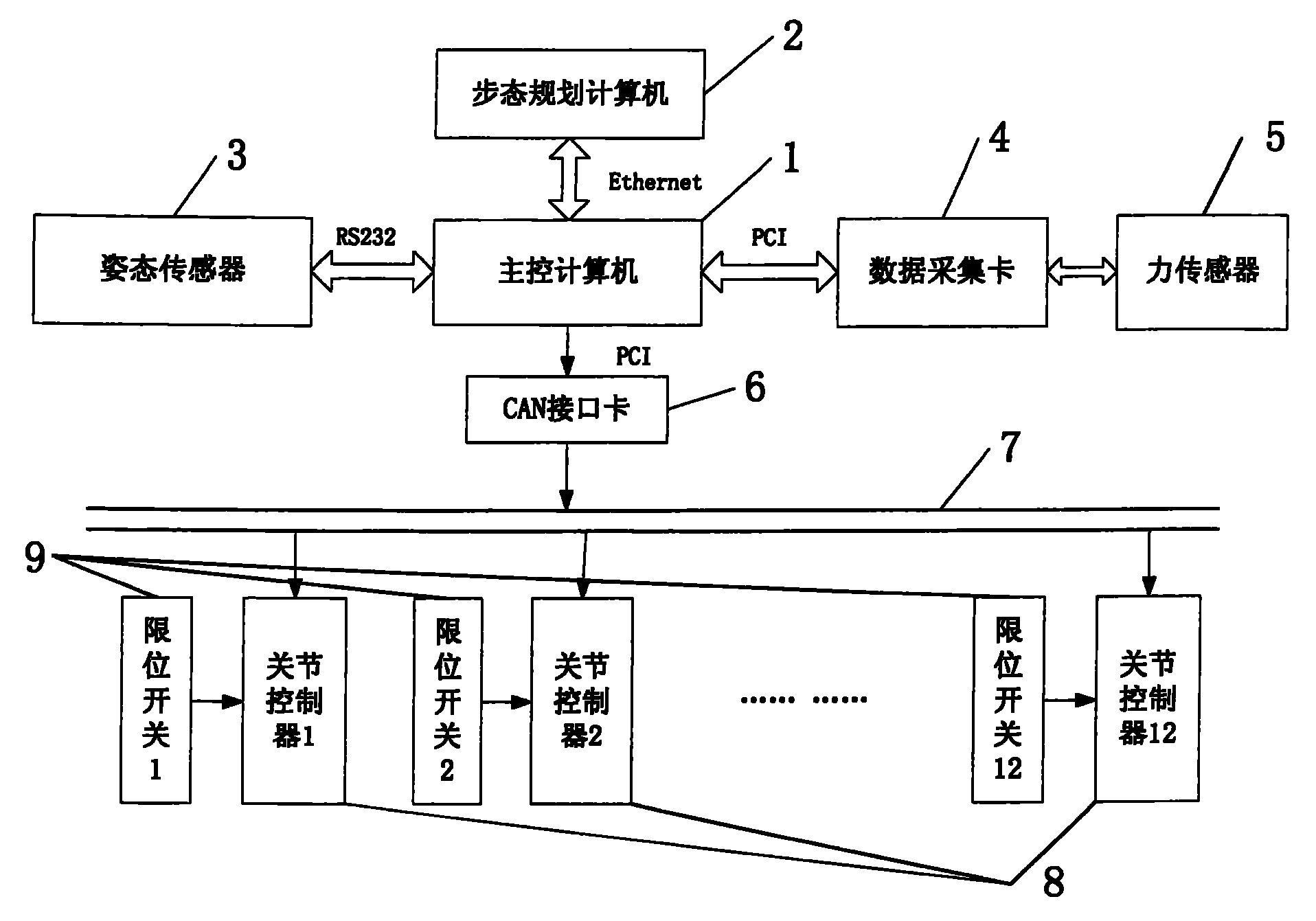
一种双足机器人步行机构控制系统
图片尺寸1916x1341
双足爬壁机器人壁面凹过渡步态规划研究.pdf
图片尺寸800x1185
为比例增益,微分增益及积分增益;e为关节规划转角与实际关节转角之差
图片尺寸1795x992
新款17自由度人形舞蹈机器人 双足竞走机器人 教学套件 带舵机
图片尺寸1920x1920
配合摄像头,力度传感器可以实现机器人自主制定行走路线以及步态规划
图片尺寸638x619
中国首个成功在野外徒步的双足机器人,先进在哪?
图片尺寸1080x623