四足机器人机构原理图

一种基于总线的四足机器人
图片尺寸2026x1661
四足机器人坡面行走稳定性分析
图片尺寸700x433
四足机械狗 - 仿生机器人 - 产品和解决方案 - 京天机器人官网-京天
图片尺寸780x760
一种水平关节四足机器人的制作方法
图片尺寸1000x840
cn113044130a_腿构型可变的直驱型四足机器人在审
图片尺寸1113x1086
一种四足双臂机器人及其运行模式
图片尺寸1000x786
【毕业设计】履带四足复合机器人
图片尺寸1008x605
一种基于曲柄摇杆的轮足式四足机器人的制作方法
图片尺寸443x347
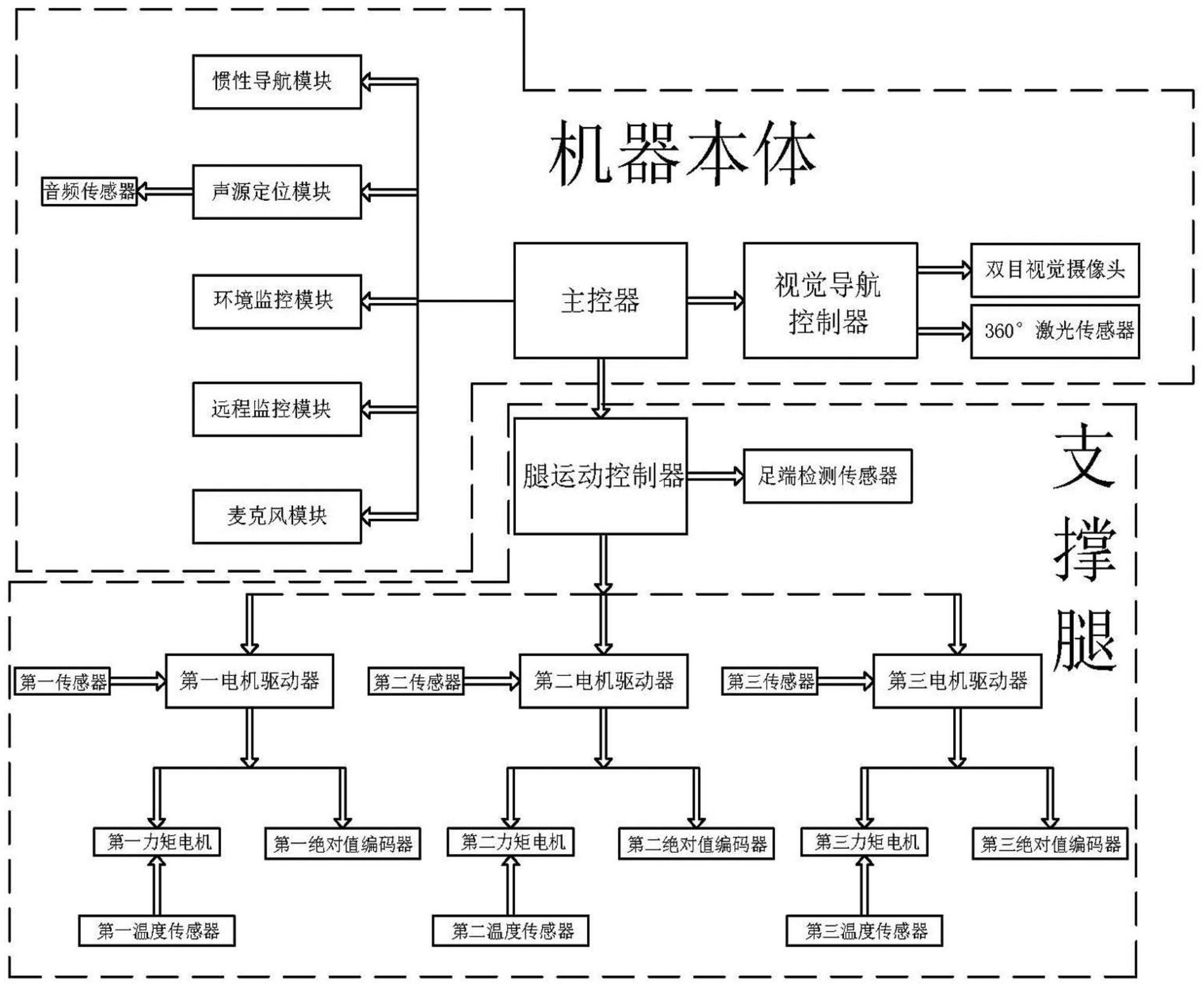
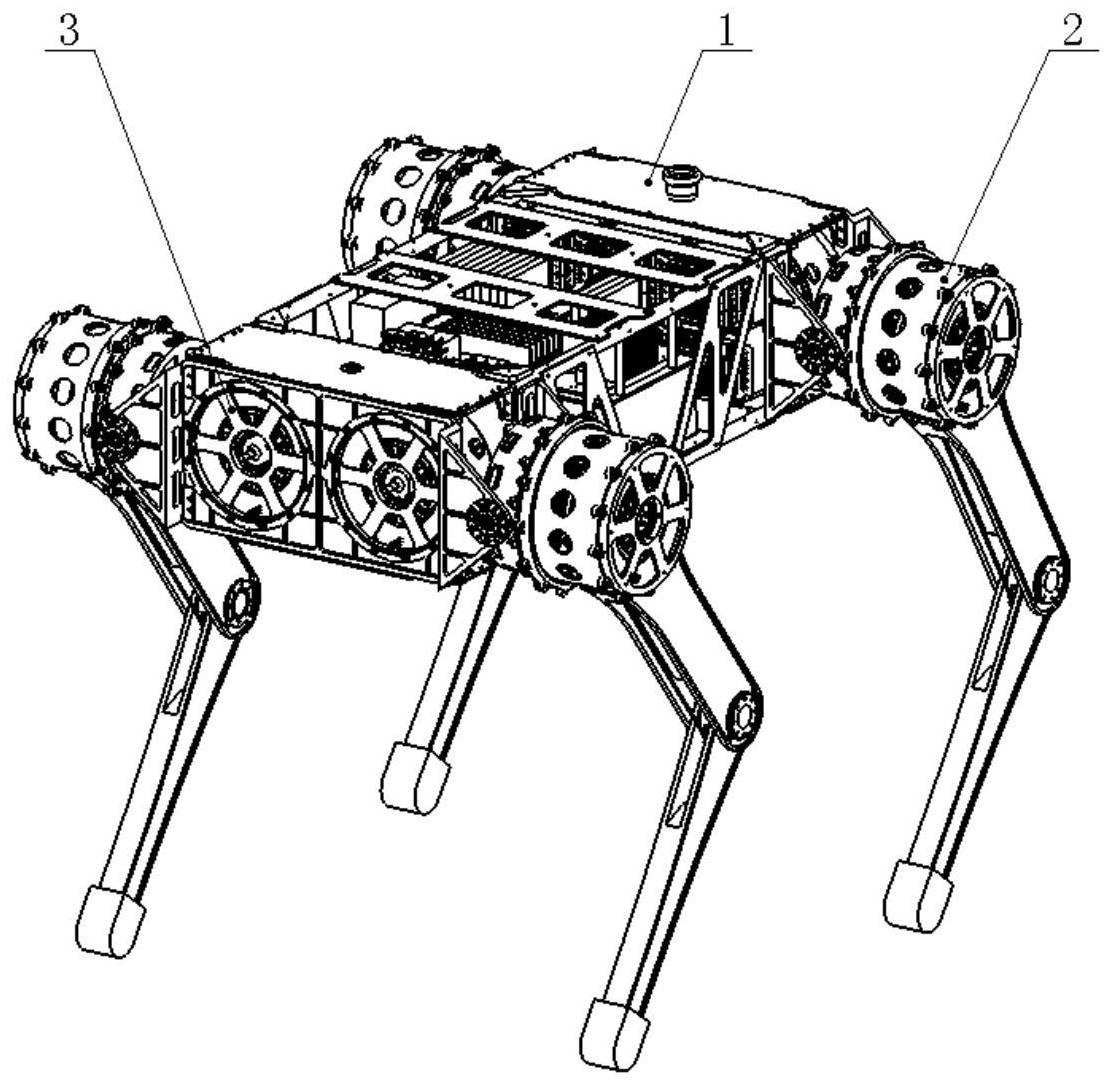
智能化四足机器人的制作方法
图片尺寸1000x701
一种十二自由度的四足机器人的制作方法
图片尺寸1000x813
cn102897246a_对角线足刚性连接以对角小跑方式行走的四足机器人失效
图片尺寸1000x825
一种液压驱动的四足机器人控制系统技术方案
图片尺寸1000x757
cn111483533a_一种可变构型的全向移动仿生四足机器人在审
图片尺寸1000x935
一种简易四足机器人结构的制作方法
图片尺寸574x506
一种四足磁吸附爬壁机器人运动学分析及仿真
图片尺寸1575x1077
一种仿生四足机器人的制作方法
图片尺寸1000x809
一种轻型电动四足机器人的制作方法
图片尺寸1000x864
一种四足仿生行走机器人的制作方法
图片尺寸1000x905
一种面向未知崎岖地形的四足机器人运动规划方法技术
图片尺寸1000x538
cn206606273u_四足机器人失效
图片尺寸1000x896