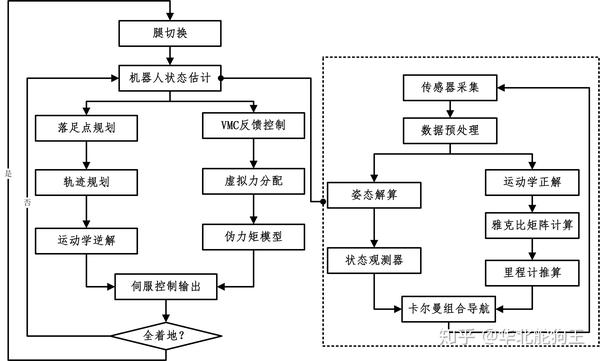
四足机器人步态流程图

四足机器人溜蹄步态规划方法,装置,设备及可读介质与流程
图片尺寸1000x877
一种基于中枢模式发生器的四足机器人的步态规划方法中枢模式发生器及
图片尺寸1670x1107
华北舵狗王带你一起做四足机器人2moco8四足机器人控制算法简介
图片尺寸720x433
毕业论文 会追光的四足步行机器人
图片尺寸794x1123
一种步态识别方法及系统与流程
图片尺寸918x1000
pvcbot【14号c版】机械狗--四足爬行机器人
图片尺寸481x212
一种基于强化学习和cpg控制器的四足机器人步态控制方法与流程
图片尺寸1000x827
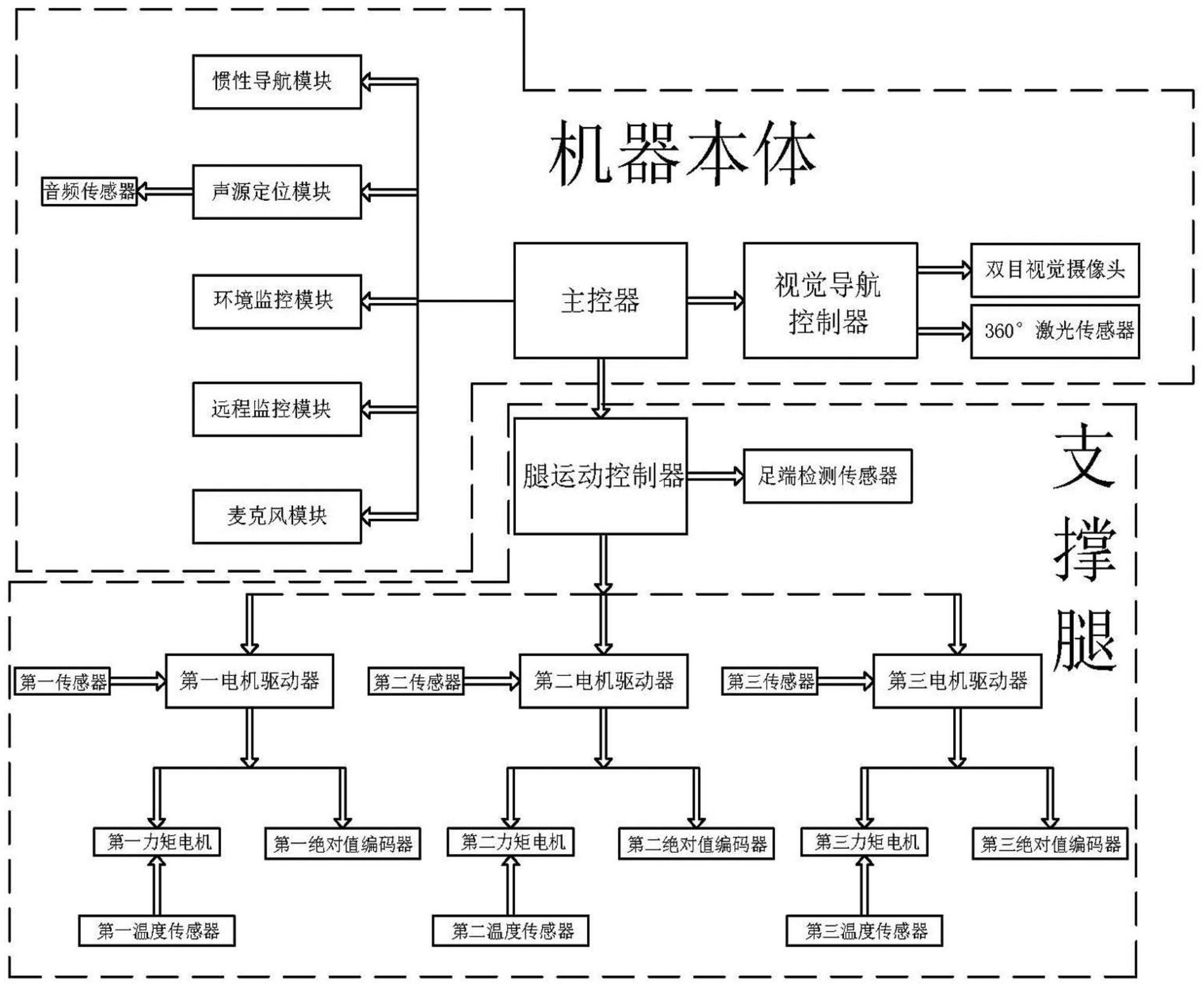
一种基于总线的四足机器人
图片尺寸2026x1661
从动力系统,步态分析,详细探讨了波士顿动力机器人背后的技术实现
图片尺寸708x486
机器人程序流程图
图片尺寸290x410
rospigot四足机器人控制仿真综合一倒地恢复
图片尺寸387x640
强化学习3基于强化学习的四足机器人运动控制
图片尺寸700x312
四足舞蹈机器人的实现策略
图片尺寸565x706
一种四足机器人复合式越障轨迹规划方法与流程
图片尺寸1000x597
图3 机器人动作流程图
图片尺寸500x639
(1)针对静步态的迈步顺序,规划四足机器人的主步态,(2)建立以躯干运动
图片尺寸350x443
超强干货详细探讨波士顿动力机器人背后的技术实现
图片尺寸960x604
四足机器人ppt
图片尺寸1080x810
一种基于四足机器人的巡检系统及方法与流程
图片尺寸965x528
一种步态规划方法,装置,计算机可读存储介质及机器人与流程
图片尺寸1000x417