四足机器人腿部构造

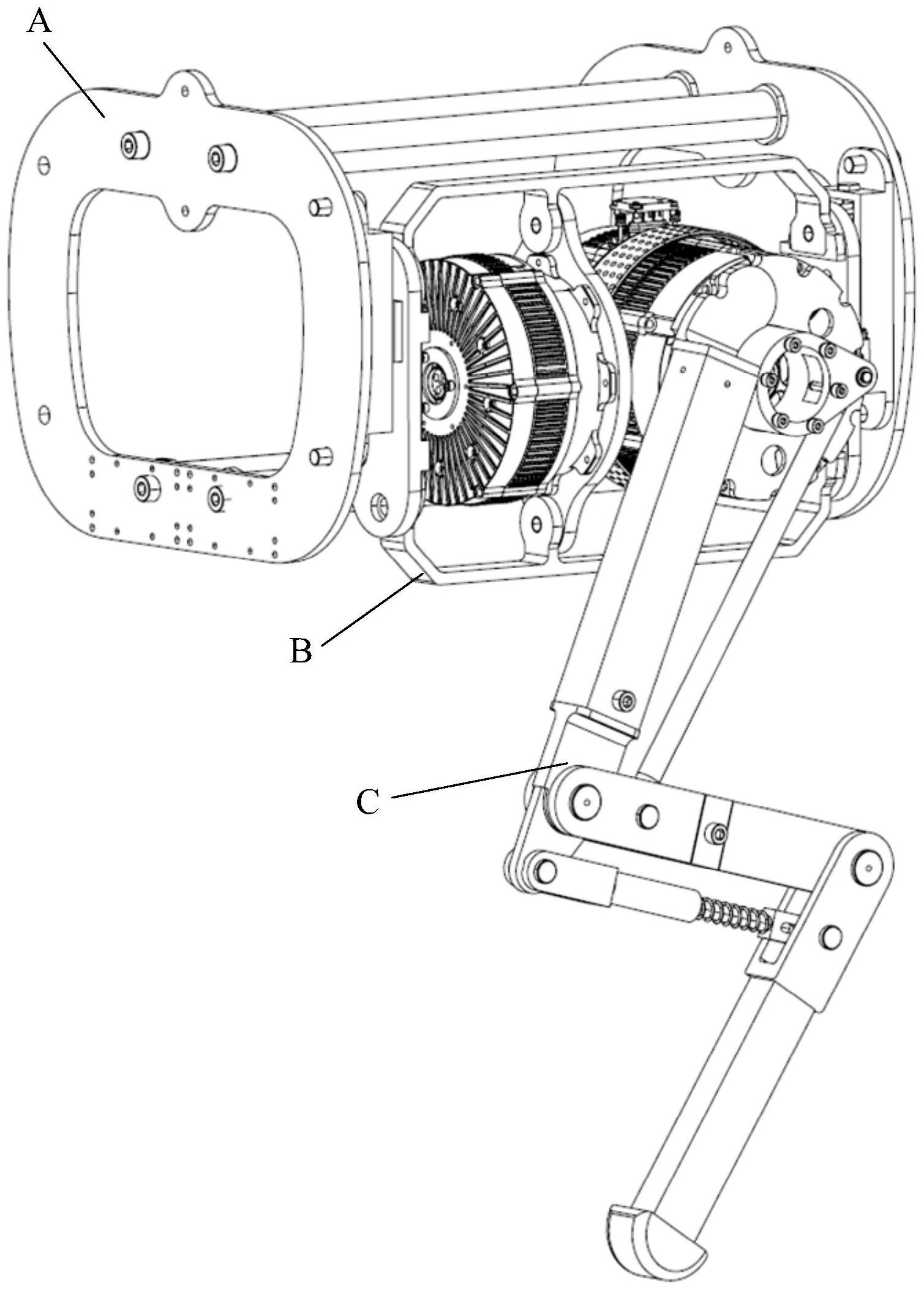
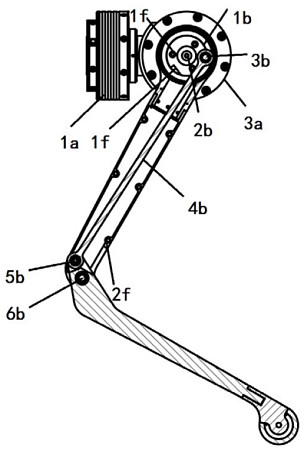
一种新型四足机器人腿部关节
图片尺寸1541x2110
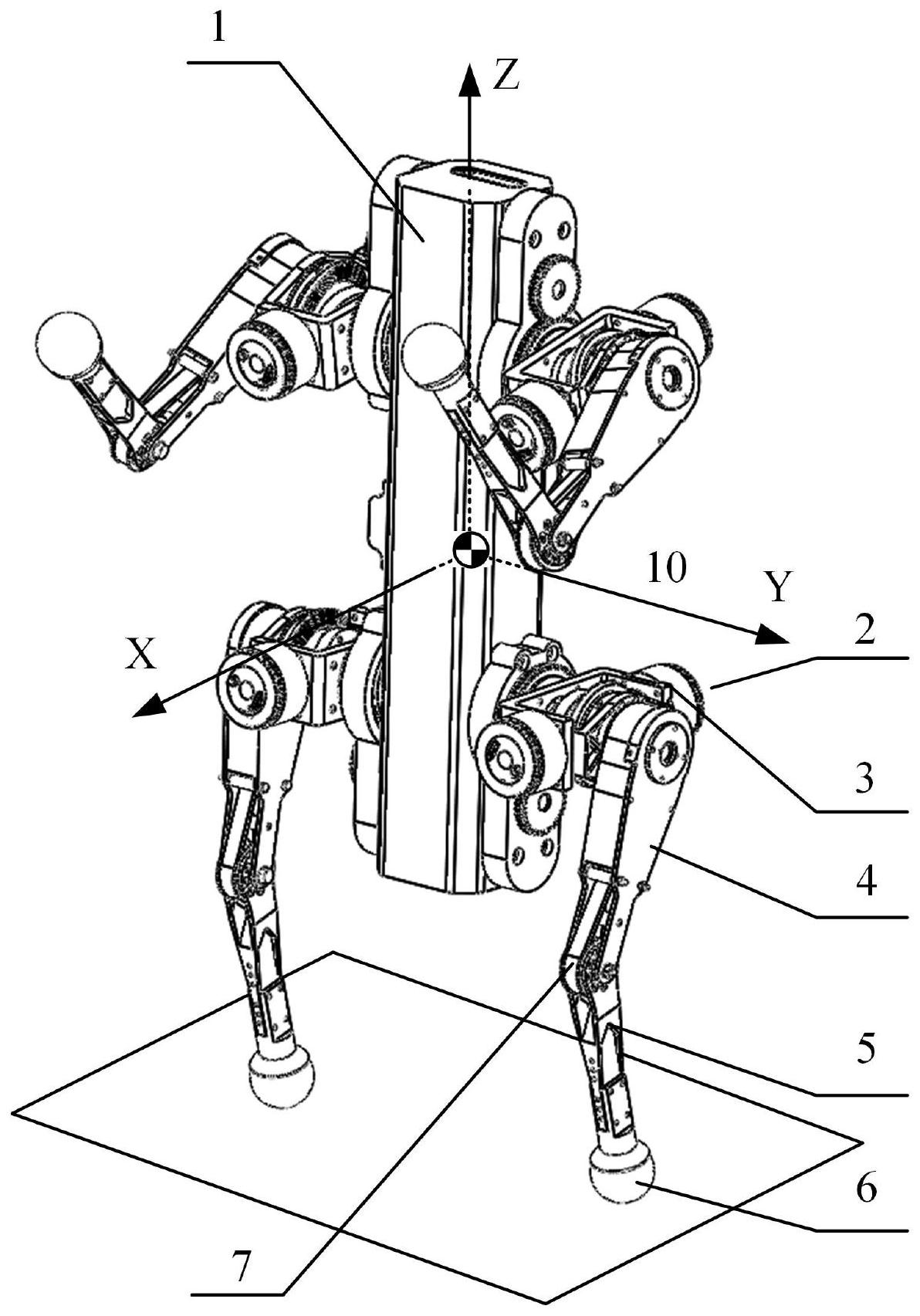
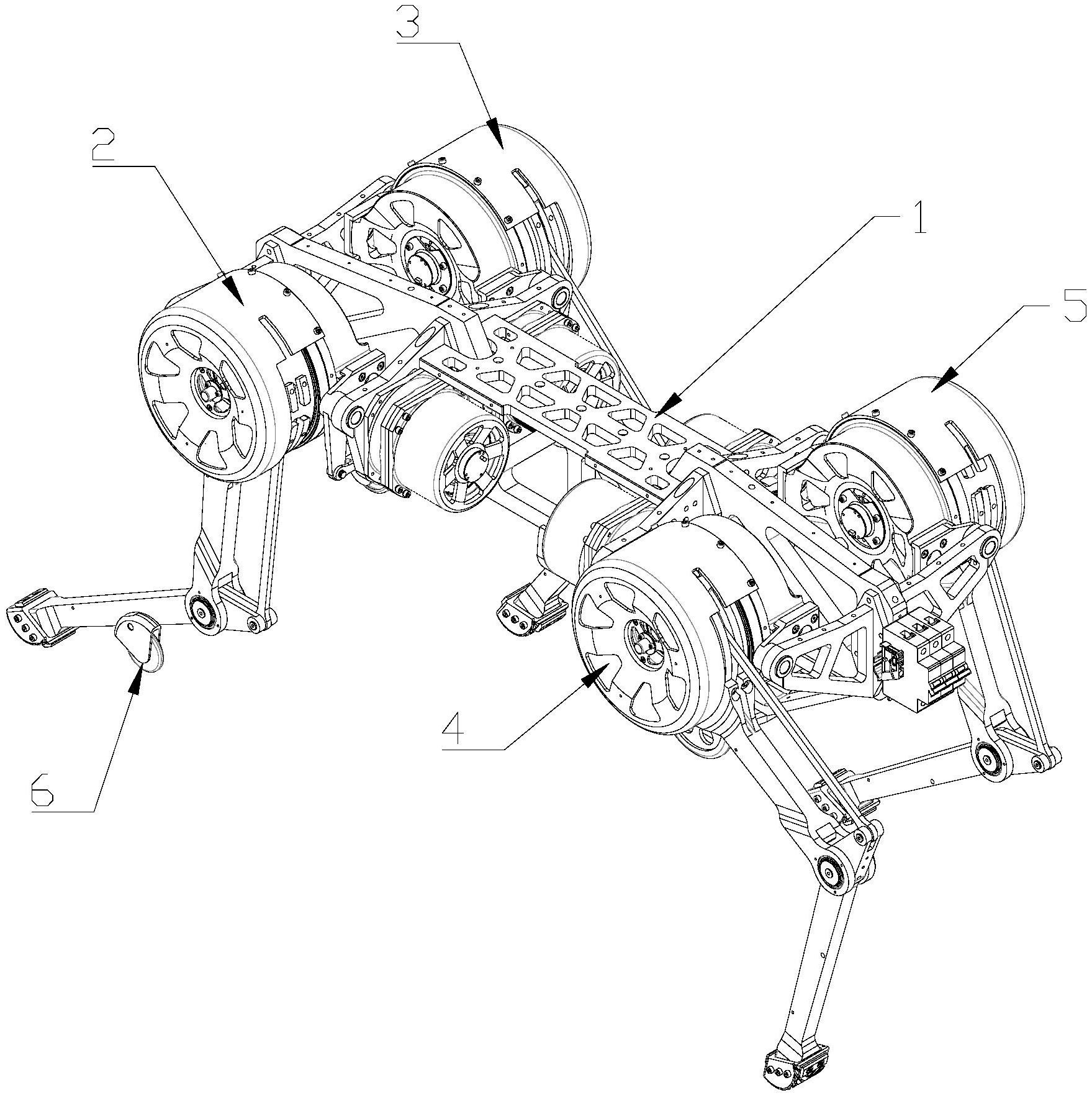
具有高动态四足运动模式和双臂工作模式的人形机器人
图片尺寸1192x1705
一种四足机器人腿部的制作方法
图片尺寸937x1000
本技术涉及机器人领域,尤其涉及一种四足机器狗的腿部结构.
图片尺寸1331x1680
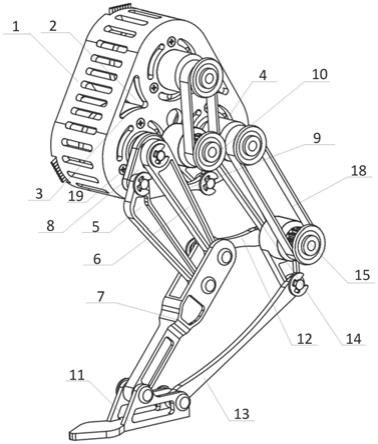
一种四足机器人仿生腿部机构
图片尺寸1509x2107
科研一角‖四足机器人不同腿部构型及其应用场景分析
图片尺寸410x336
一种仿生机器人腿足机构的制作方法
图片尺寸378x444
【专利解密】一"站"成名 鹏行智能新型四足机器人腿部设计方案
图片尺寸304x449
一种四足机器人腿部测试装置和方法与流程
图片尺寸1746x1950
cn211995914u_轮腿结合的四足机器人有效
图片尺寸1759x1768
专利解密一站成名鹏行智能新型四足机器人腿部设计方案
图片尺寸444x291
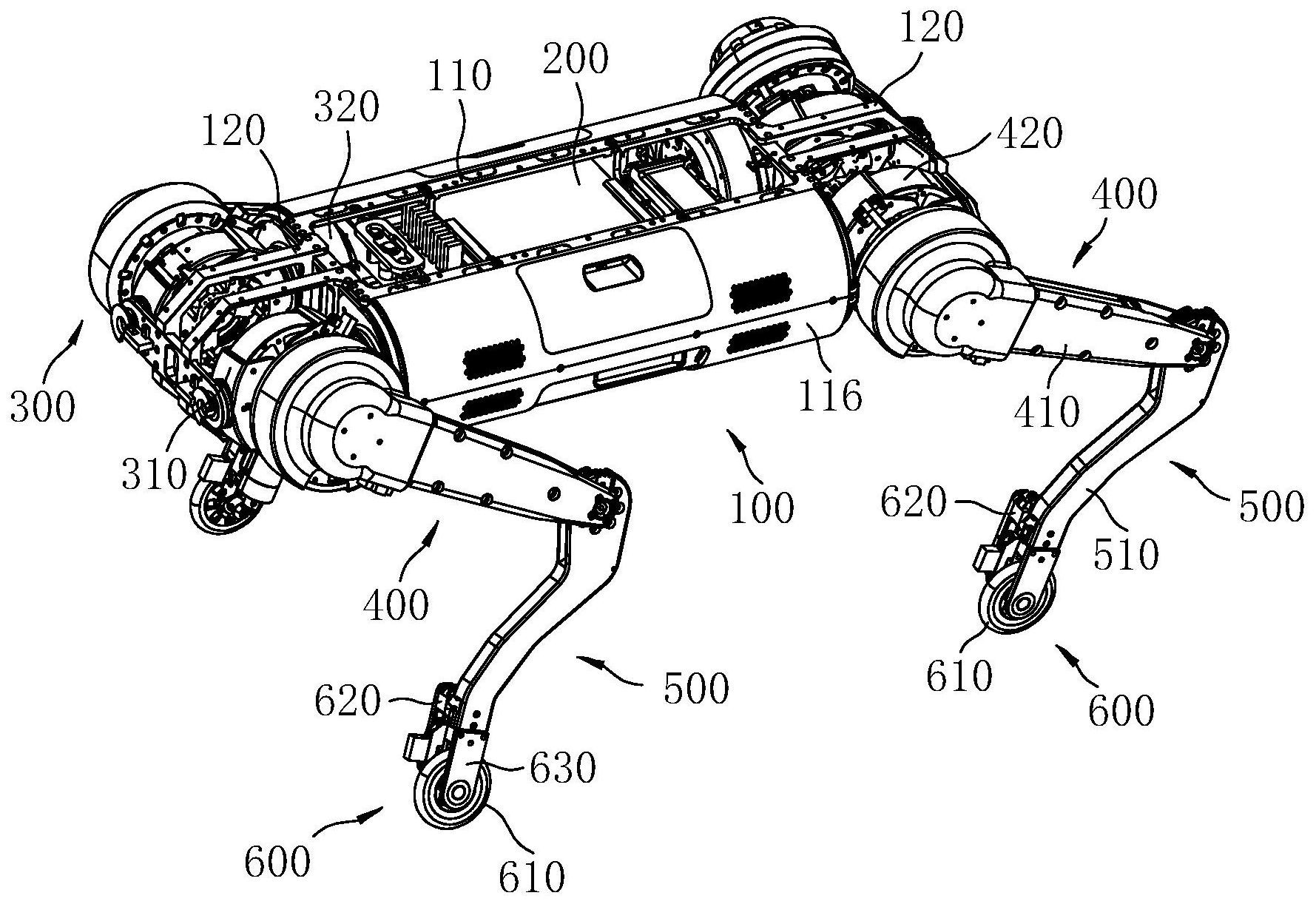
四足机器人
图片尺寸1779x1222
四足仿生机器人腿
图片尺寸921x1000
"跳跃-翻转-奔跑"低成本四足机器人全面开源!
图片尺寸938x1076
一种功能器械可快速拆装的四足机器人的制作方法
图片尺寸1544x1483
一种四足机器人仿生腿部机构的制作方法
图片尺寸716x1000
四足仿生机器人腿
图片尺寸414x450
一种基于klann连杆机构优化进简开发的四足机器人
图片尺寸443x354
奔跑四足机器人腿结构设计与分析
图片尺寸390x504
一种基于多级耦合并联机构的四足机器人腿
图片尺寸954x2495