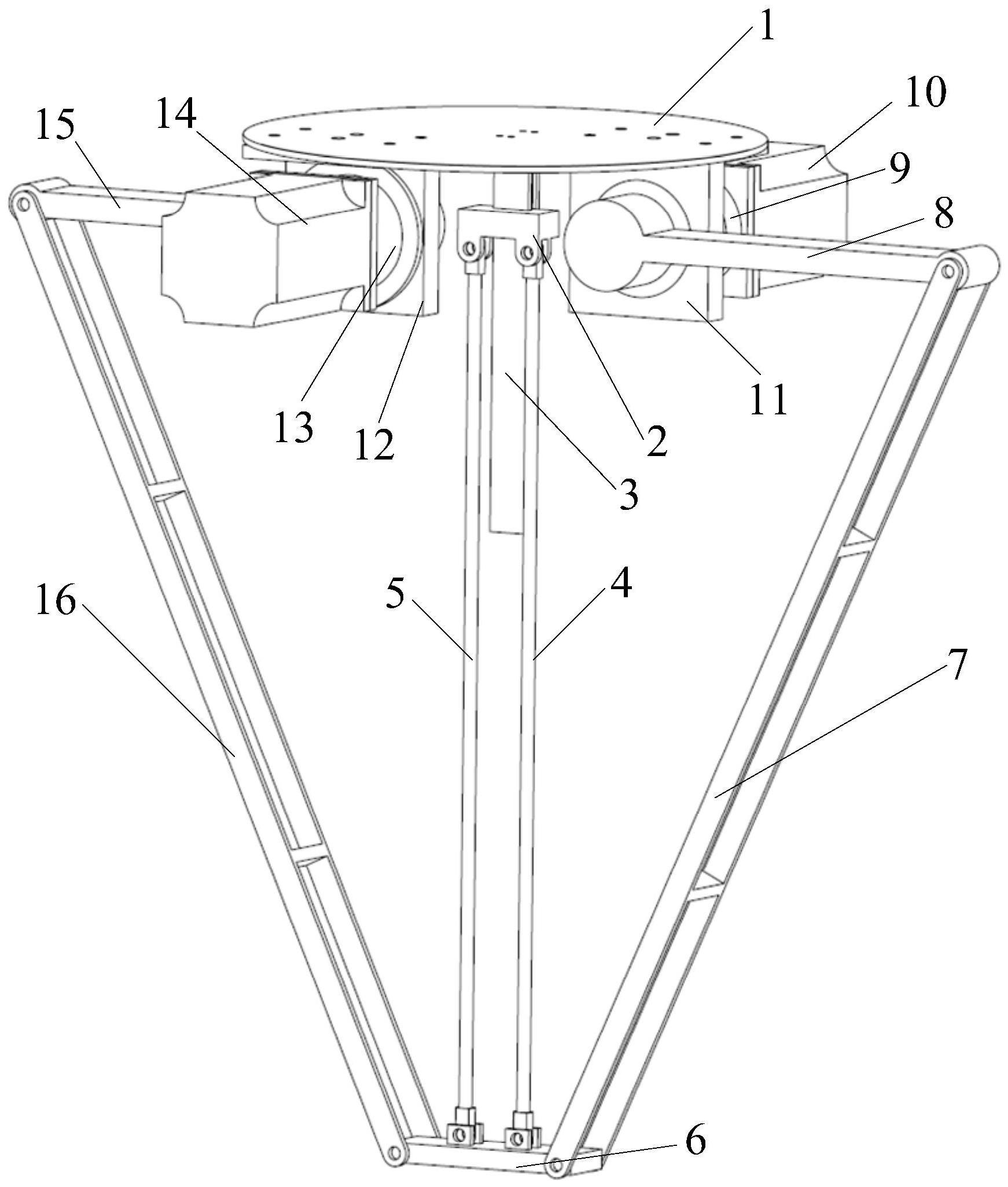
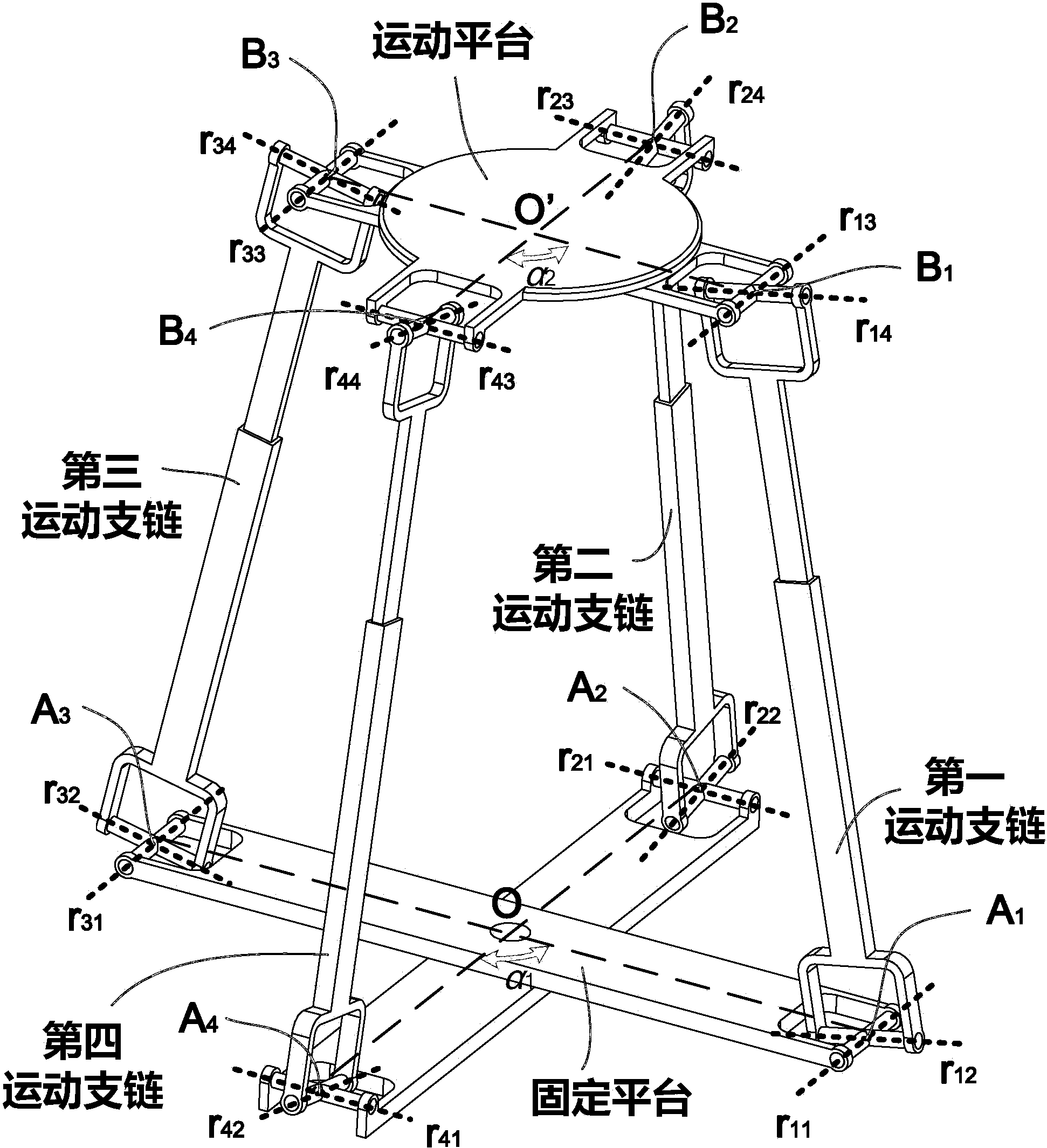
并联机构简图

一种空间三平移一转动并联机构
图片尺寸984x1000
一种同输入轴球面并联机构
图片尺寸729x1000
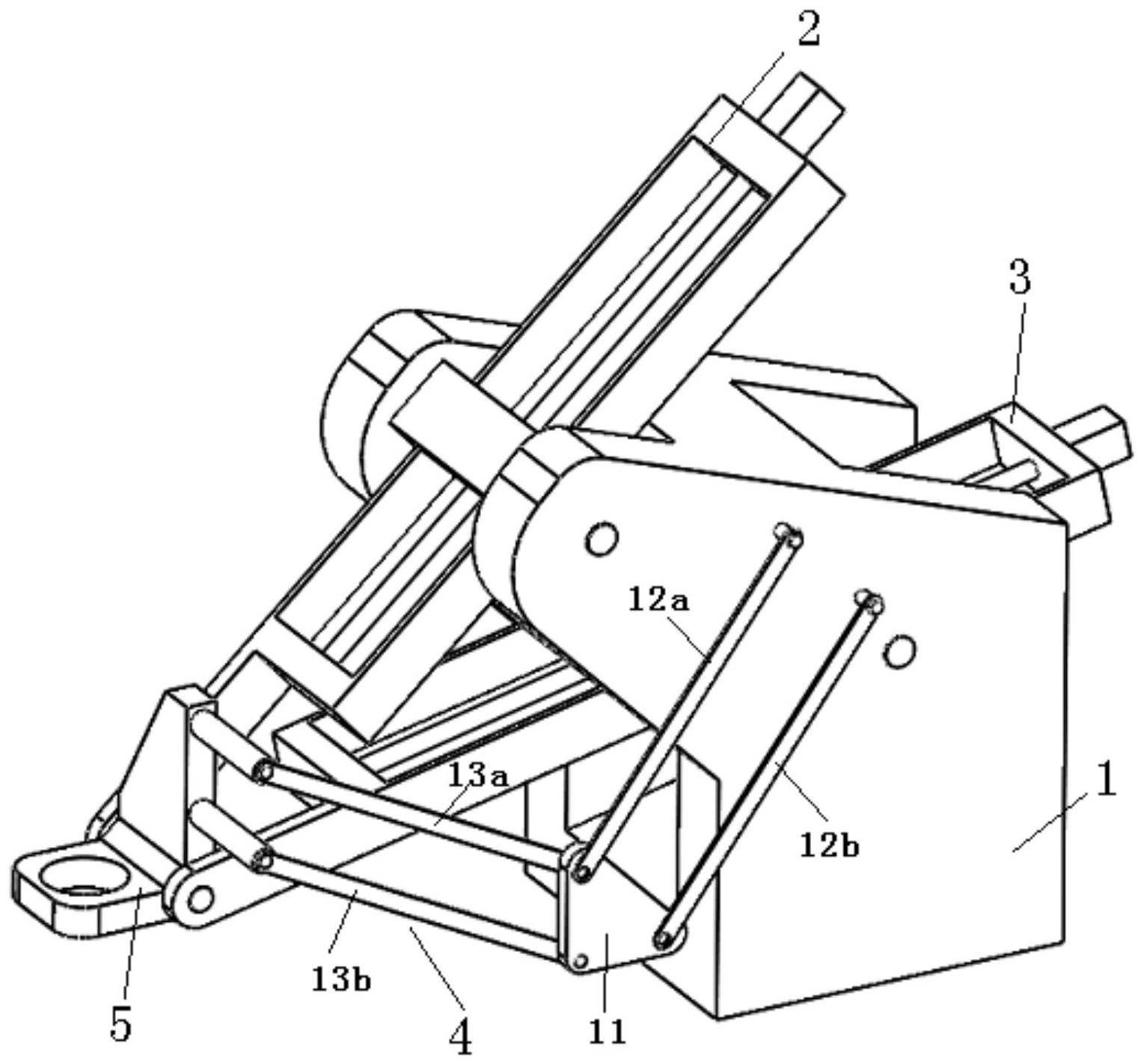
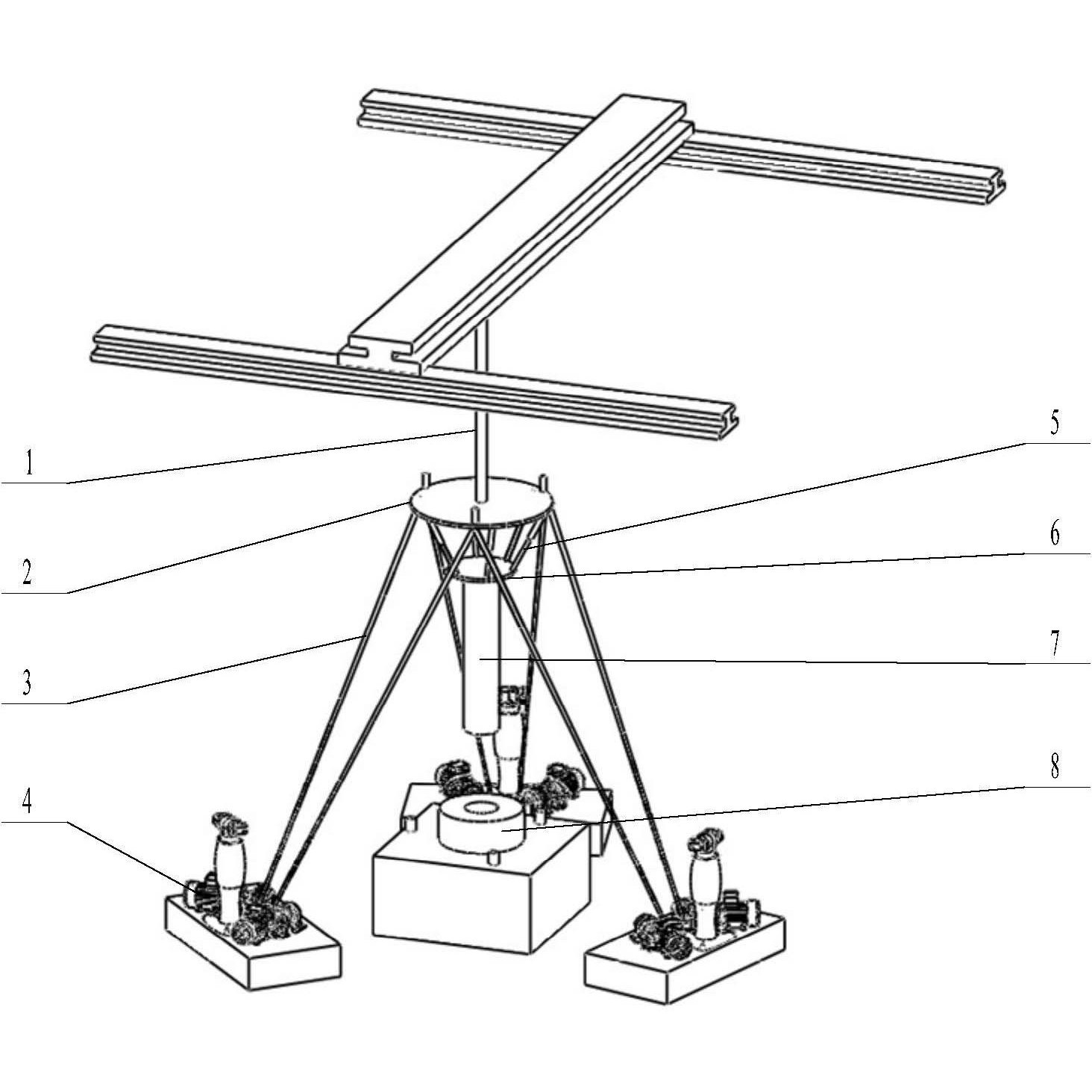
一种两平动一转动三自由度并联机构的制作方法
图片尺寸1000x677
一种新型面对称两转动并联机构
图片尺寸968x951
4_upu并联机器人机构及其运动学
图片尺寸887x668
一种二自由度平面并联机器人机构
图片尺寸1742x2051
一种可变工作空间冗余驱动4upu
图片尺寸1942x2130
一种具有四类工作模式的三自由度并联机构
图片尺寸1955x1747
两平动自由度并联机构
图片尺寸1529x1422
具有两转一移三自由度的对称结构并联机构
图片尺寸1624x1438
一种可实现三或四自由度的高速并联机器人机构
图片尺寸444x376
一种三自由度2prupsr并联机构的制作方法
图片尺寸968x1000
一种零耦合度的两平移一转动并联机构的制作方法
图片尺寸921x1000
新型2r
图片尺寸350x321
一种六自由度并联机构的制作方法
图片尺寸1000x977
🔋并联电路连接实物图教程.💥电路图观察
💥首先我们来
图片尺寸1920x1080
一种用于精密装配的两级并联机器人装置
图片尺寸1464x1464
1965年,德国stewart发明了六自由度并联机构,并作为飞行模拟器用于
图片尺寸1400x1305
具有非对称支链的三平动自由度并联机构有效
图片尺寸1428x964
基于虚拟样机技术的并联机器人机构运动仿真
图片尺寸254x409