张拉整体受力示意图

张拉整体结构的趣味力学:缺腿少柱的桌子
图片尺寸1278x566
张拉整体结构
图片尺寸1080x810
张拉整体结构模块组合的力密度法找形与分析
图片尺寸649x593
tensegrity(张拉整体)桥梁——分解图
图片尺寸750x295
张拉整体体系.jpg
图片尺寸760x525
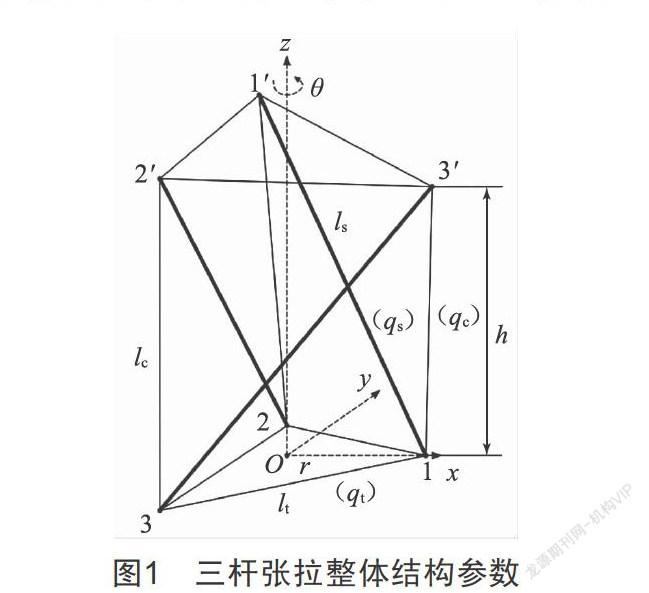
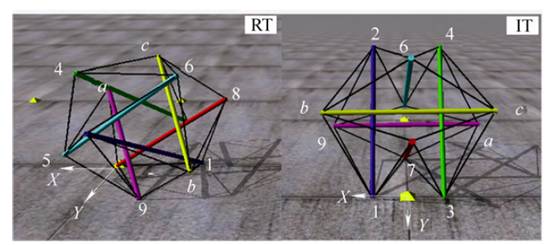
欠驱动张拉整体并联机构的运动学求解方法
图片尺寸1575x1738
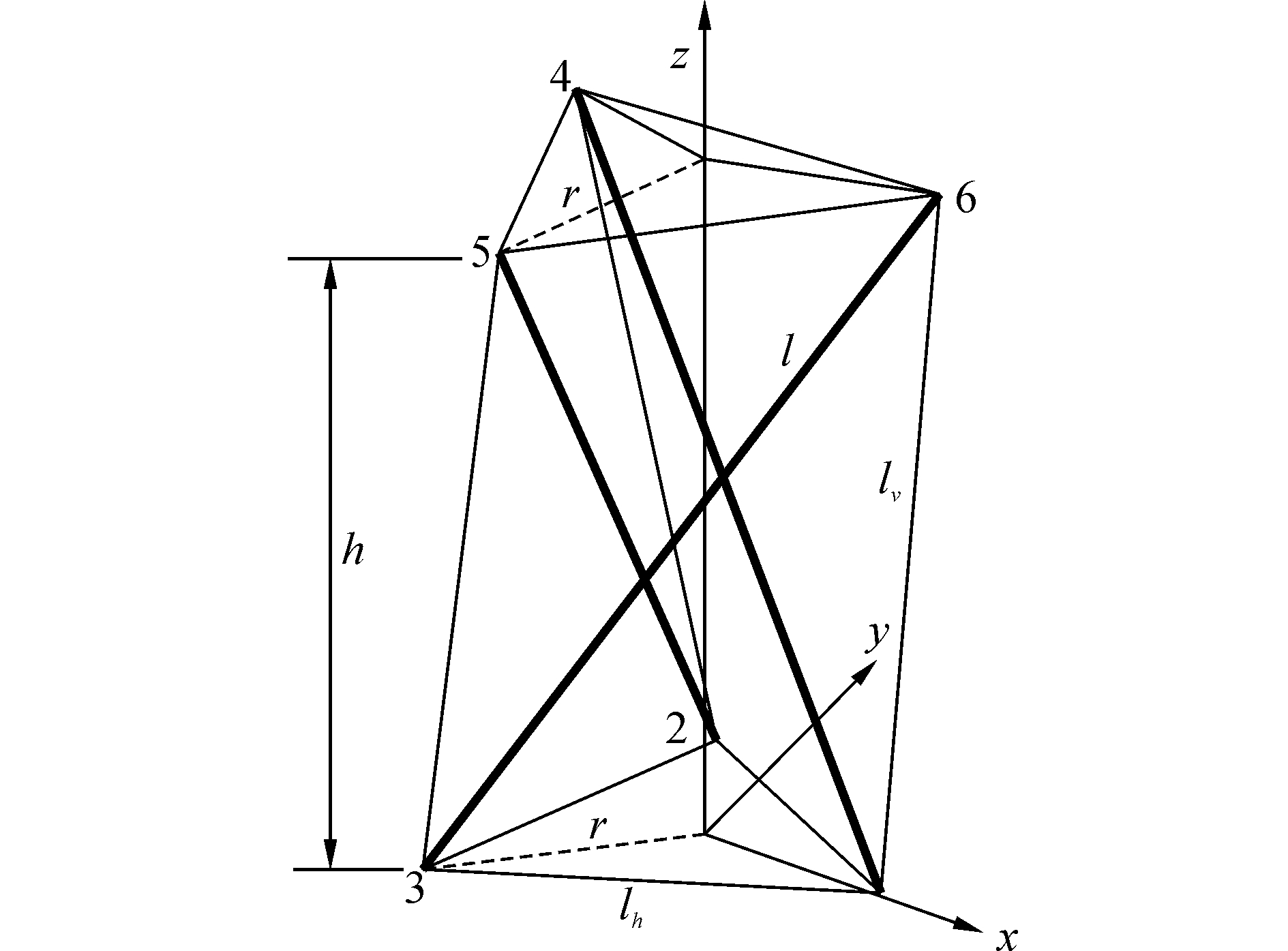
一种6杆曲杆张拉整体可动结构
图片尺寸443x337
《哈尔滨工程大学学报》
图片尺寸1889x1395
我们必须要了解一个通常被称为"张拉整体" (tensegrity)的概念
图片尺寸893x591
基于张拉整体结构的模块化机器人的制作方法
图片尺寸1000x890
张拉整体结构的动力学等效建模与实验验证1
图片尺寸630x327
各种简易张拉机具的工作原理
图片尺寸558x222
"张拉整体结构"可以把受到的力,均匀的分散到全身.
图片尺寸1080x464
张拉整体棱柱结构的拓扑构型(圆柱型结构到圆环型结构)
图片尺寸959x1356
张拉整体结构简介三
图片尺寸651x231
张拉整体体系2.jpg
图片尺寸760x496
真正意义上的张拉整体结构还未能在大型工程中得以实现,但是运用张拉
图片尺寸600x319
四杆张拉整体机器人
图片尺寸1000x909
可变结构体机器人是一种基于张拉整体结构设计的新型移动机器人,由
图片尺寸554x245
93 肩胛骨稳定性是一个张拉整体结构设计,软组织平衡至关重要.
图片尺寸548x270