机器人手爪设计图纸

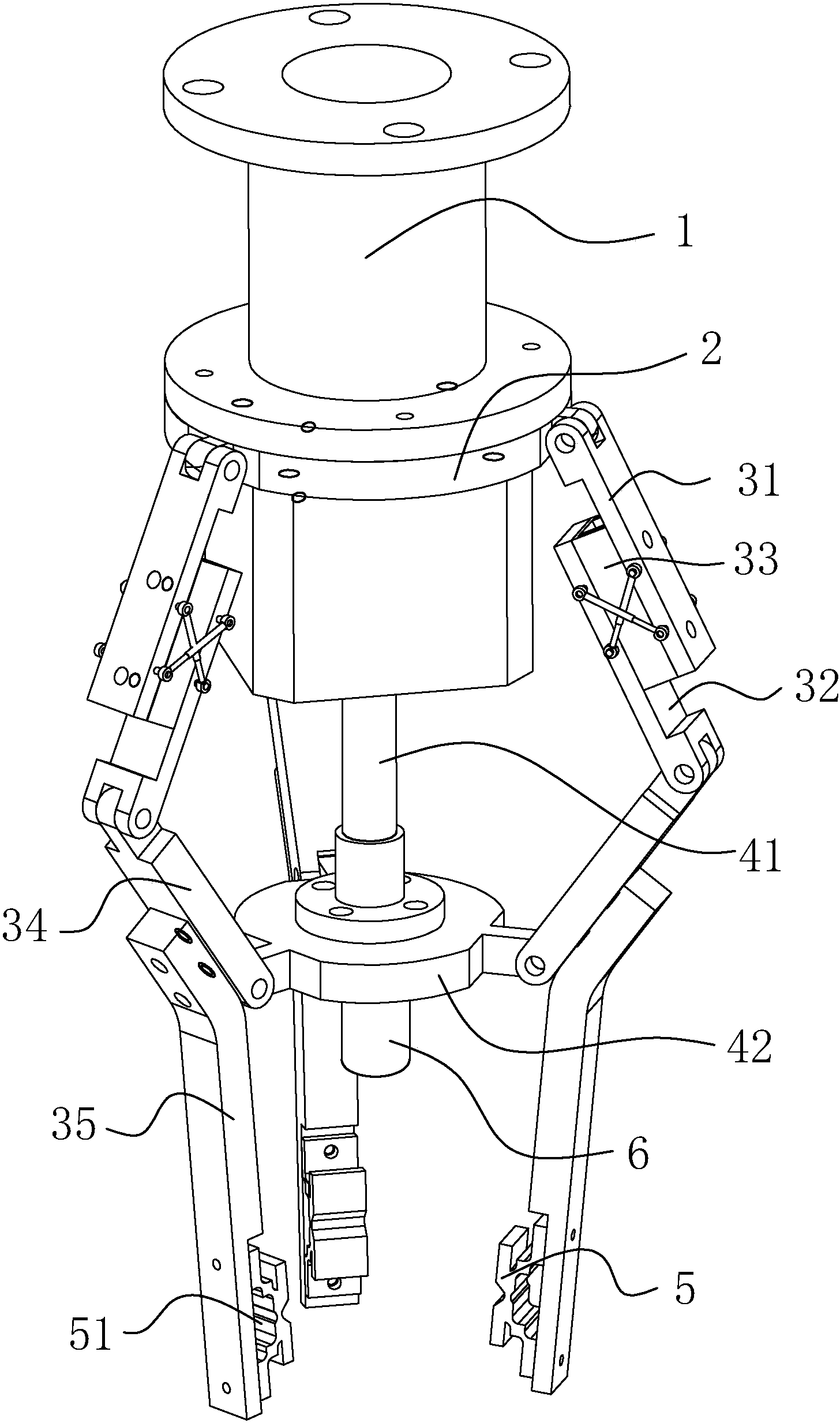
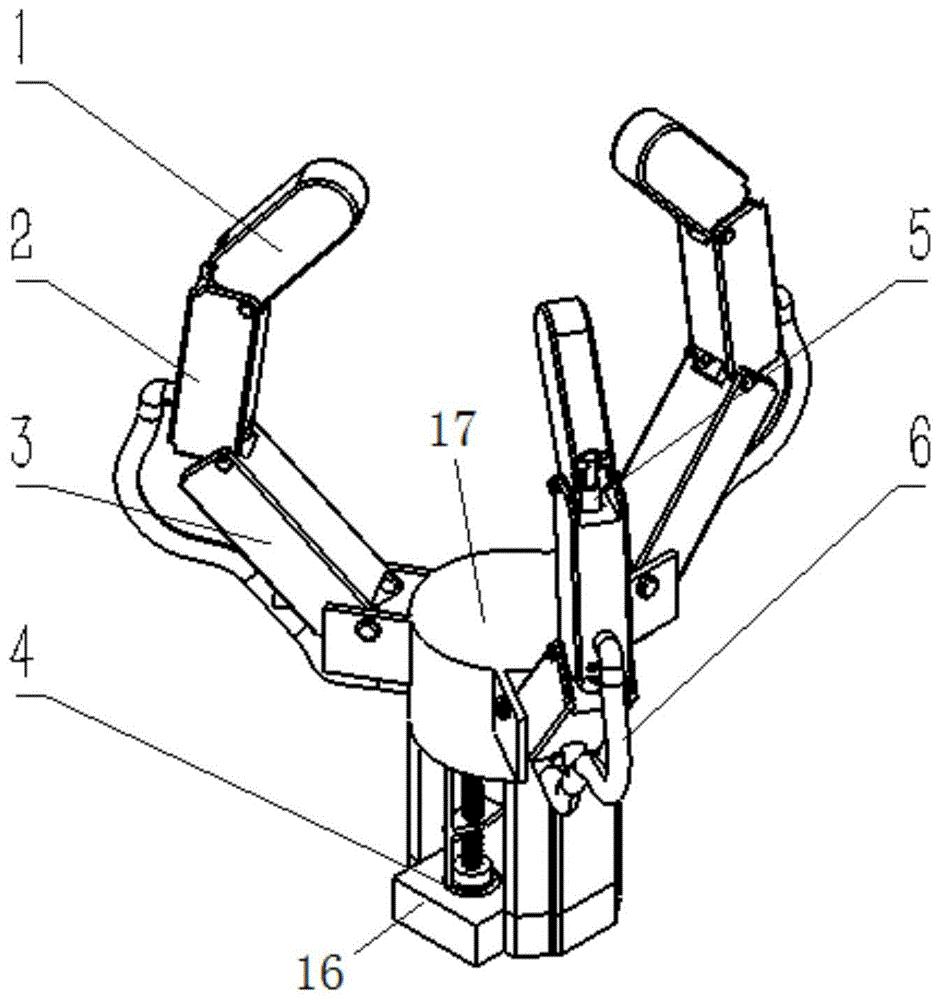
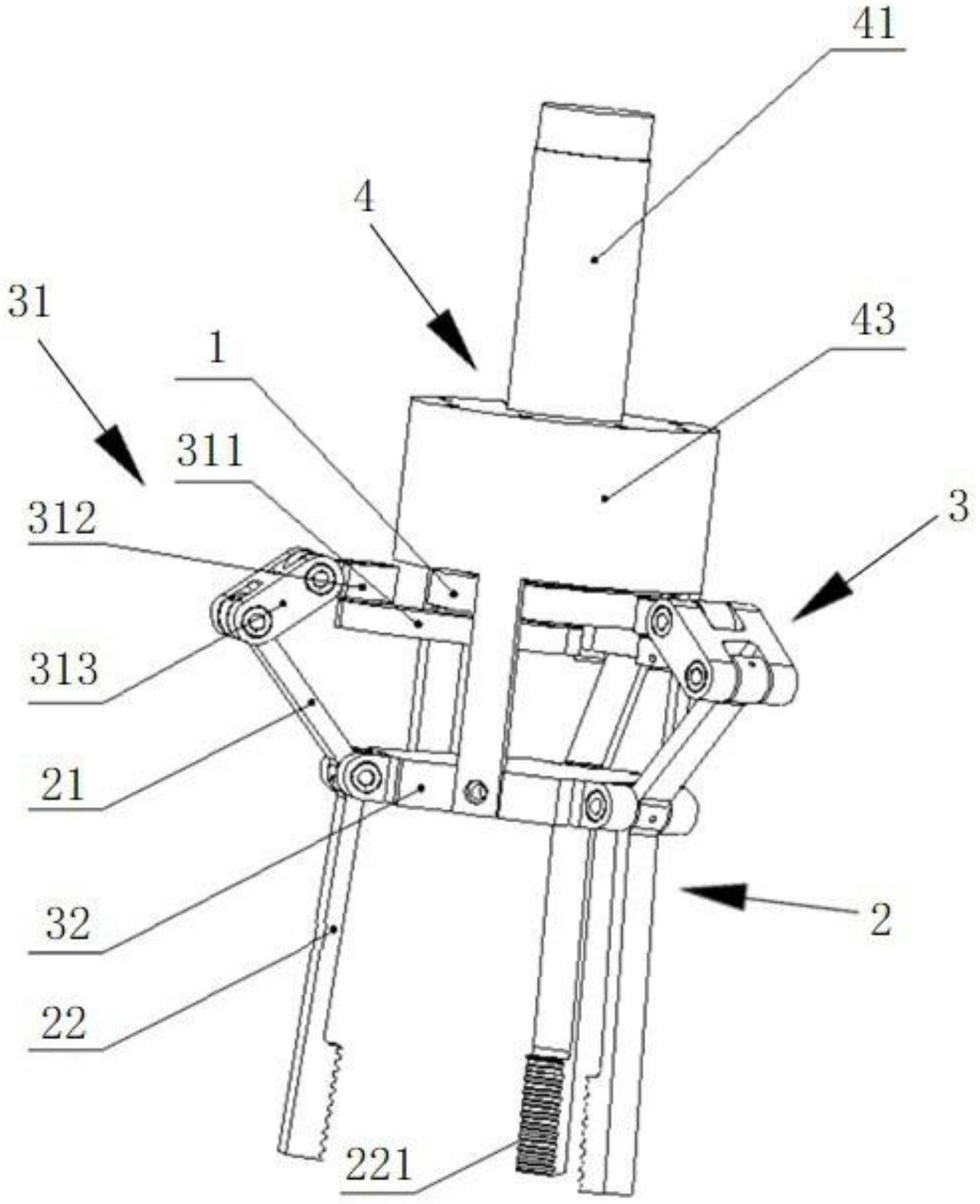
一种自适应机械手爪
图片尺寸1456x2466
专利 上海未来伙伴机器人有限公司 专利详情 申请公布号 cn206367013u
图片尺寸1000x935
机械手爪总图dwg图纸
图片尺寸820x608
一种新型工业机器人抓手的制作方法与工艺
图片尺寸996x1000
一种机器人气动机械手爪的制作方法
图片尺寸491x559
cn212445296u_一种无人机用自动机械抓手有效
图片尺寸1683x2076
一种多功能机器人手爪-爱企查
图片尺寸1469x1244
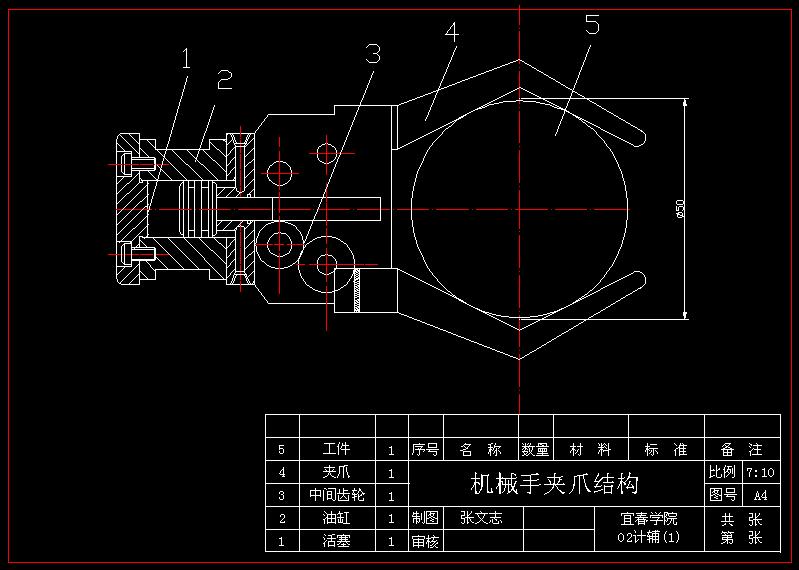
机械手夹爪图纸
图片尺寸799x570
一种液体等压欠驱动仿生机器人手爪
图片尺寸940x1000
机械手爪具手抓/两款平行夹具3d图纸设计 可定制设计机器人夹爪
图片尺寸1307x838
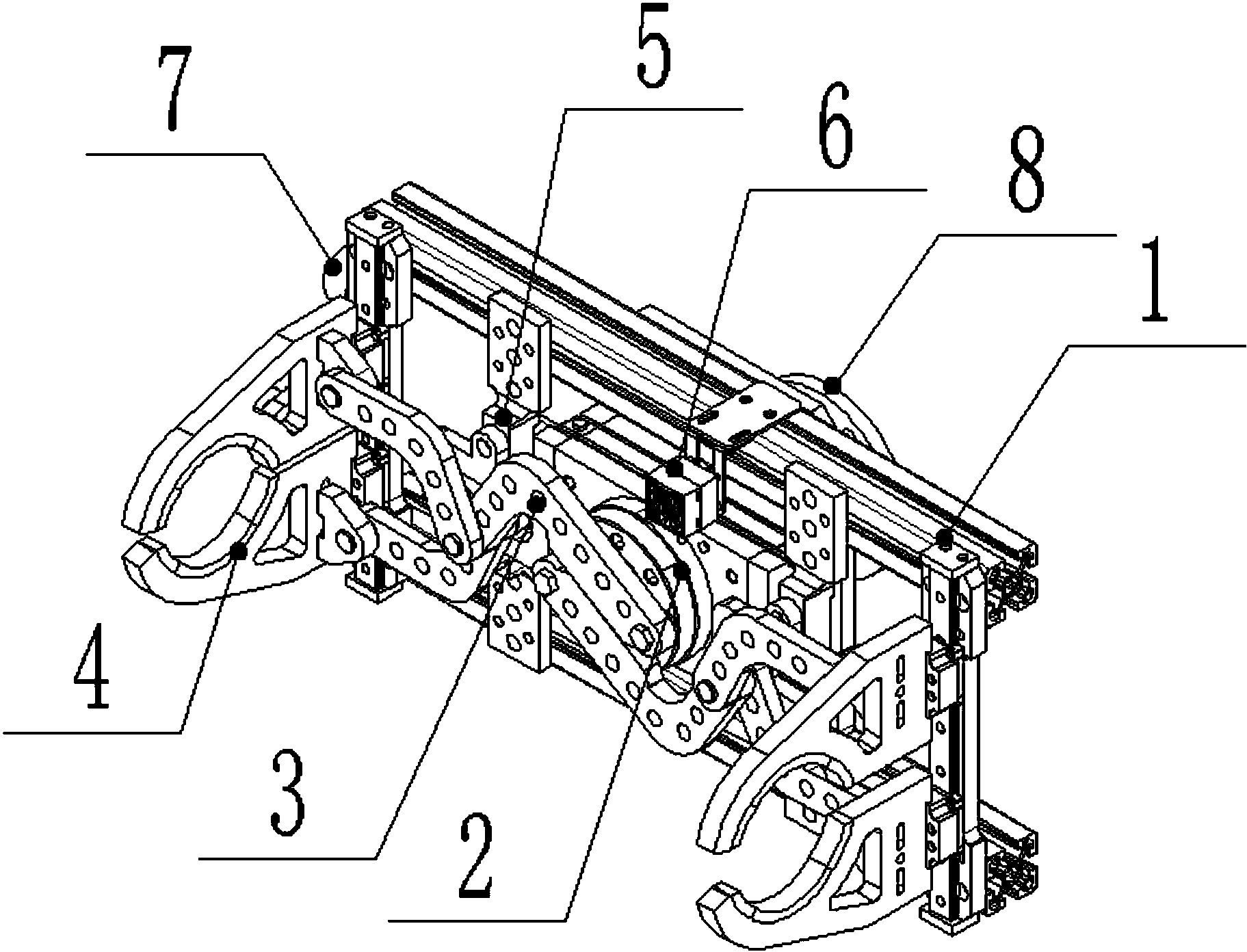
本实用新型属于机器人技术领域,具体涉及一种基于空间连杆机构的机械
图片尺寸1541x1893
一种多功能机器人抓手的制作方法
图片尺寸1000x867
涉及一种刚柔结合的仿人五指机械手爪的设计
图片尺寸842x1000
背景技术:机械爪能模仿人手和臂的某些动作功能,用以按固定程序抓取
图片尺寸890x1000
背景技术:机械手是指能模仿人手和臂的某些动作功能,用以按固定程序
图片尺寸1000x836
三指式智能机械手爪的制作方法
图片尺寸719x1000
cn206536492u_一种柔性两指构型机械手有效
图片尺寸1000x784
cn107838938a_一种机器人抓手在审
图片尺寸1823x1392
一种用于工业具有辅助定位机构的机械手夹爪
图片尺寸1350x1857
一种用于吊装野外观测设备的机械爪手的制作方法
图片尺寸870x1000










猜你喜欢:设计机器人的设计图纸机器人设计图纸手绘机器人设计图纸机器人设计图手绘机械手爪简单设计图机器人的构造设计图简单机器人设计图机器人设计草图机器人设计图怎么画机器人设计方案草图机器人图纸机械手手爪设计小学生机器人设计图机器人设计手稿机器人设计手绘机器人手爪工业机器人手爪机器人设计设计图纸与施工图纸工业机器人图纸设计图纸效果图大学生机器人设计草图设计图纸平面图简单机器人设计方案机甲设计图纸设计机器人简笔画图片机器人设计角色装修设计图纸效果图创意机器人设计方案装修设计图纸手绘loreal洗面奶80后绝版零食超级玛丽表情包gif天官赐福动图嫁衣冯庆山卡通足球背景图送给外公的画百变马丁六季电影海报 获奖史努比背景图 ins呆萌猪图片懒散猫须草肾茶