机器人运动规划

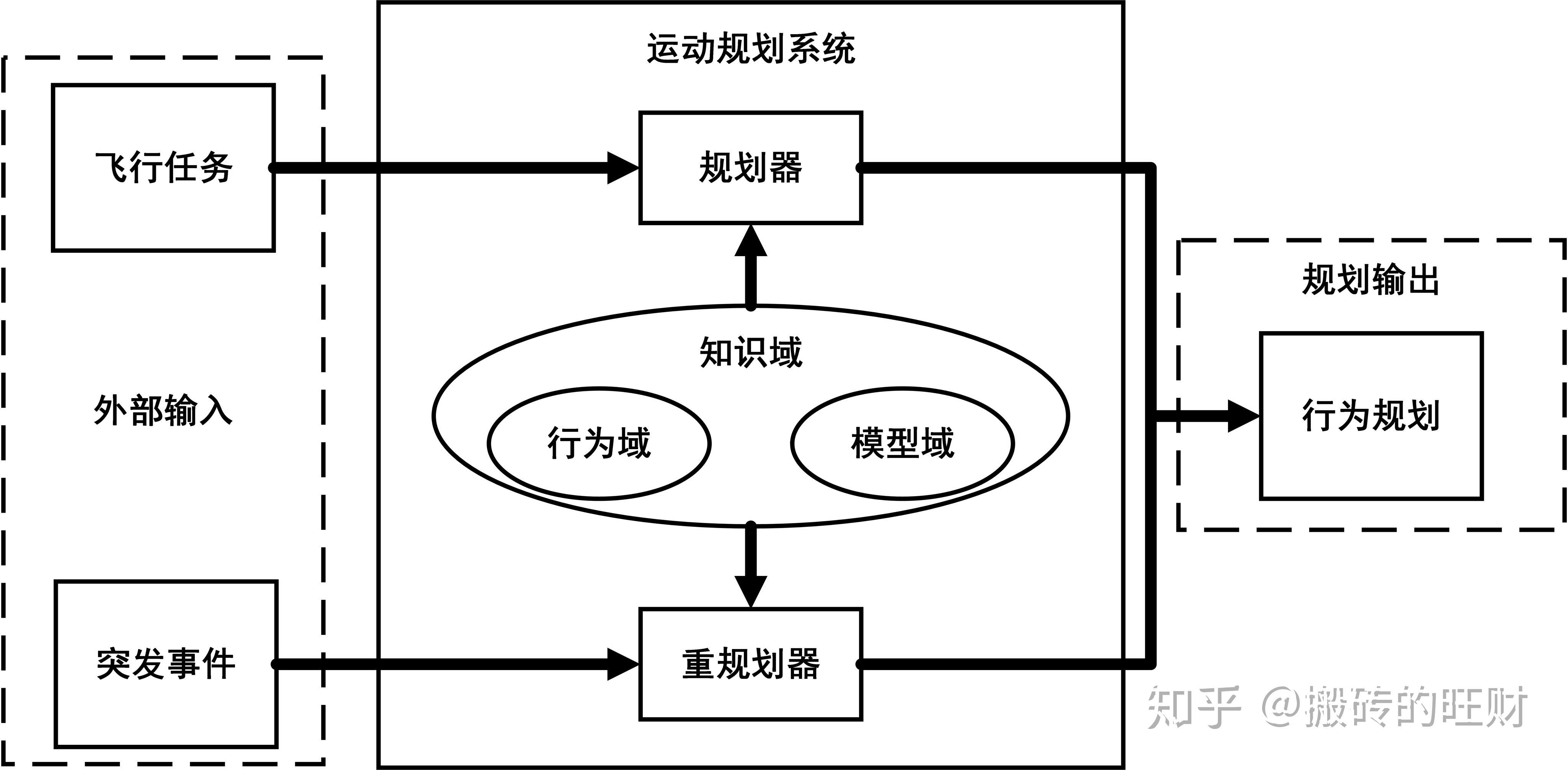
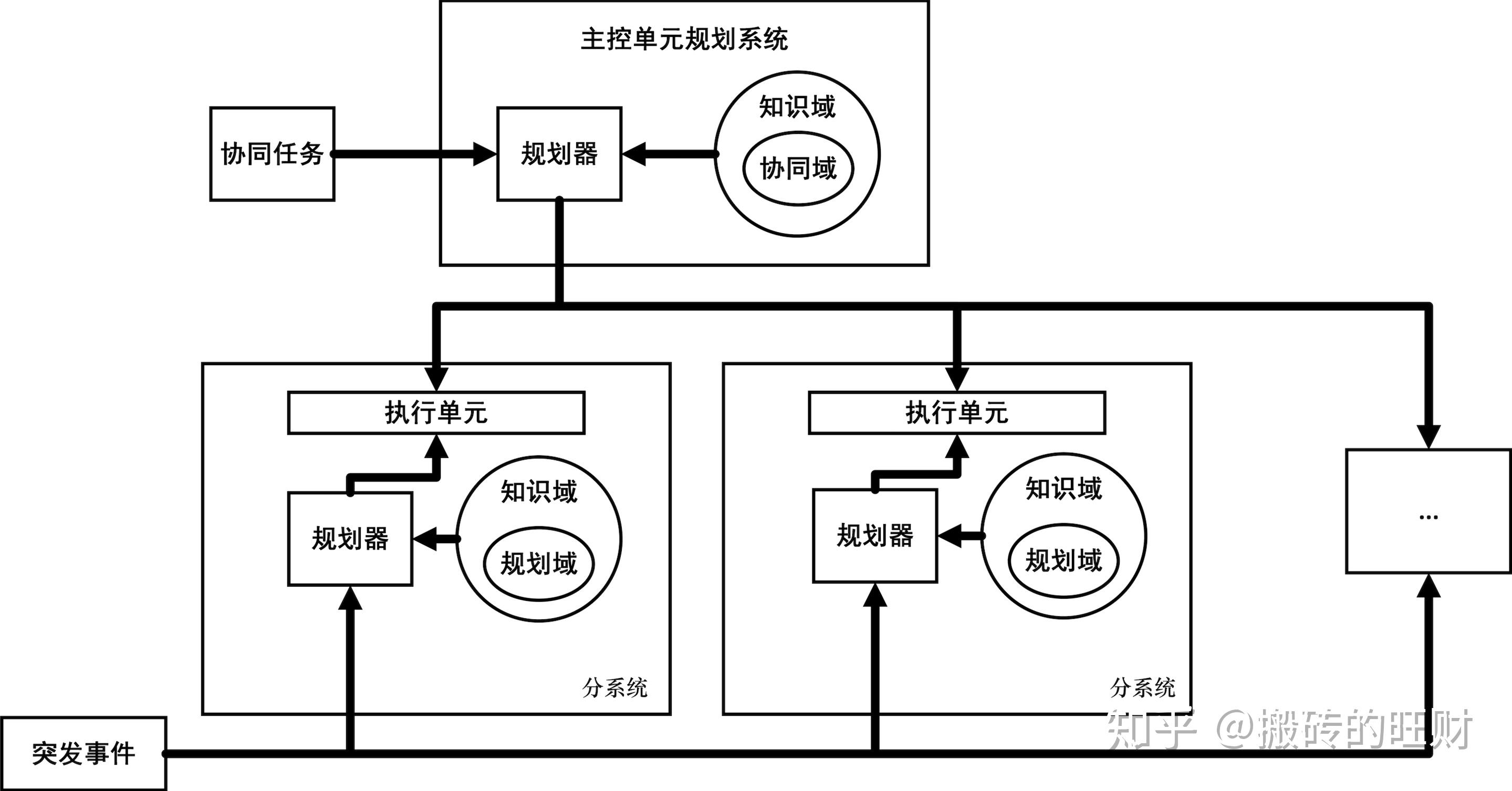
1 自主机器人近距离操作运动规划体系
图片尺寸4096x2011
1 自主机器人近距离操作运动规划体系
图片尺寸4096x2570
基于ros的码垛机器人运动仿真及轨迹规划中避障运动规划(上)
图片尺寸650x580
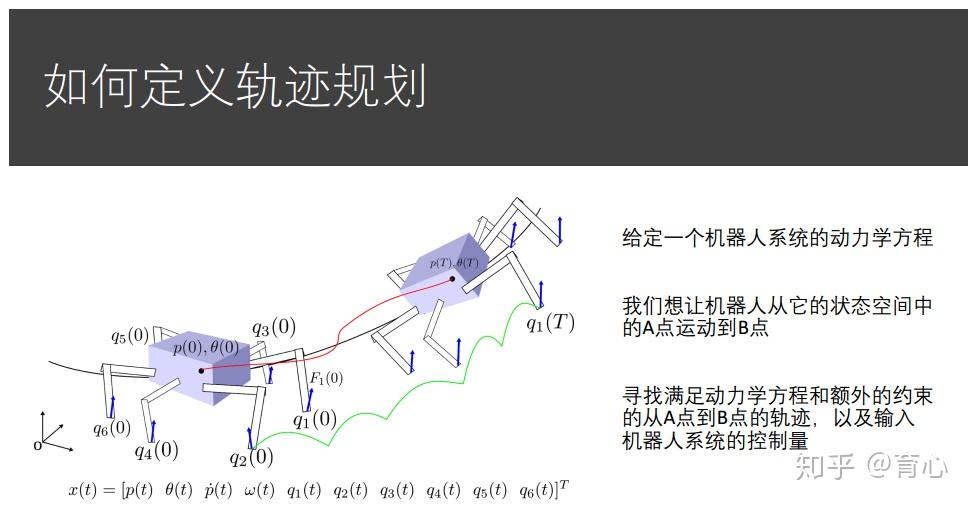
一,复杂机器人运动轨迹规划的定义和其中的挑战
图片尺寸973x505
机器人运动规划
图片尺寸900x369
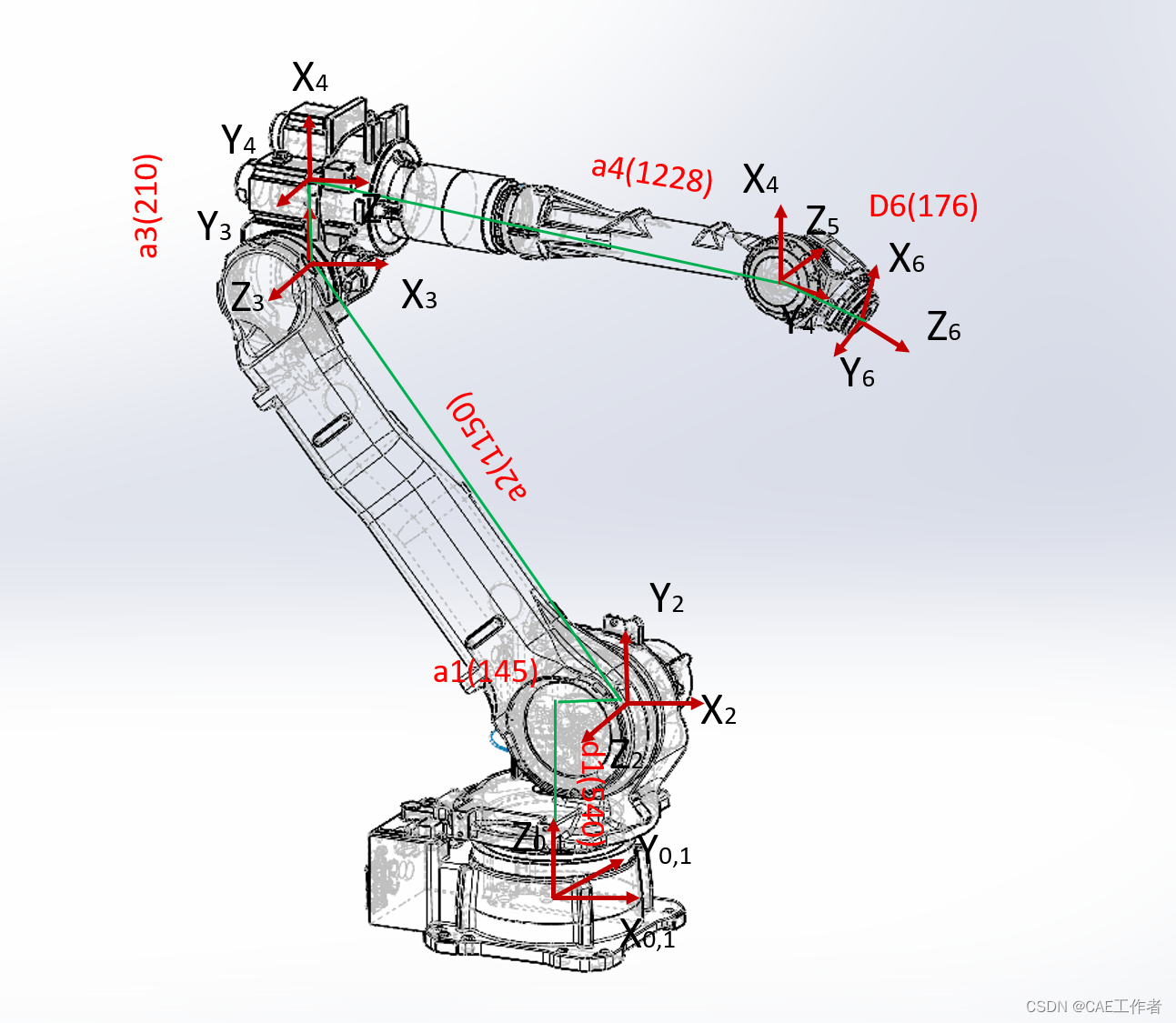
本发明涉及一种机器人运动规划方法,尤其涉及一种六轴机器人空间运动
图片尺寸659x1000
机器人运动规划03什么是运动规划
图片尺寸667x511
多足步行机器人运动规划与控制,陈学东,孙翊,贾文川,华中科技大学出版
图片尺寸299x430
小型袋装食品自动装箱机器人及真空吸盘结构设计及运动仿真
图片尺寸828x954
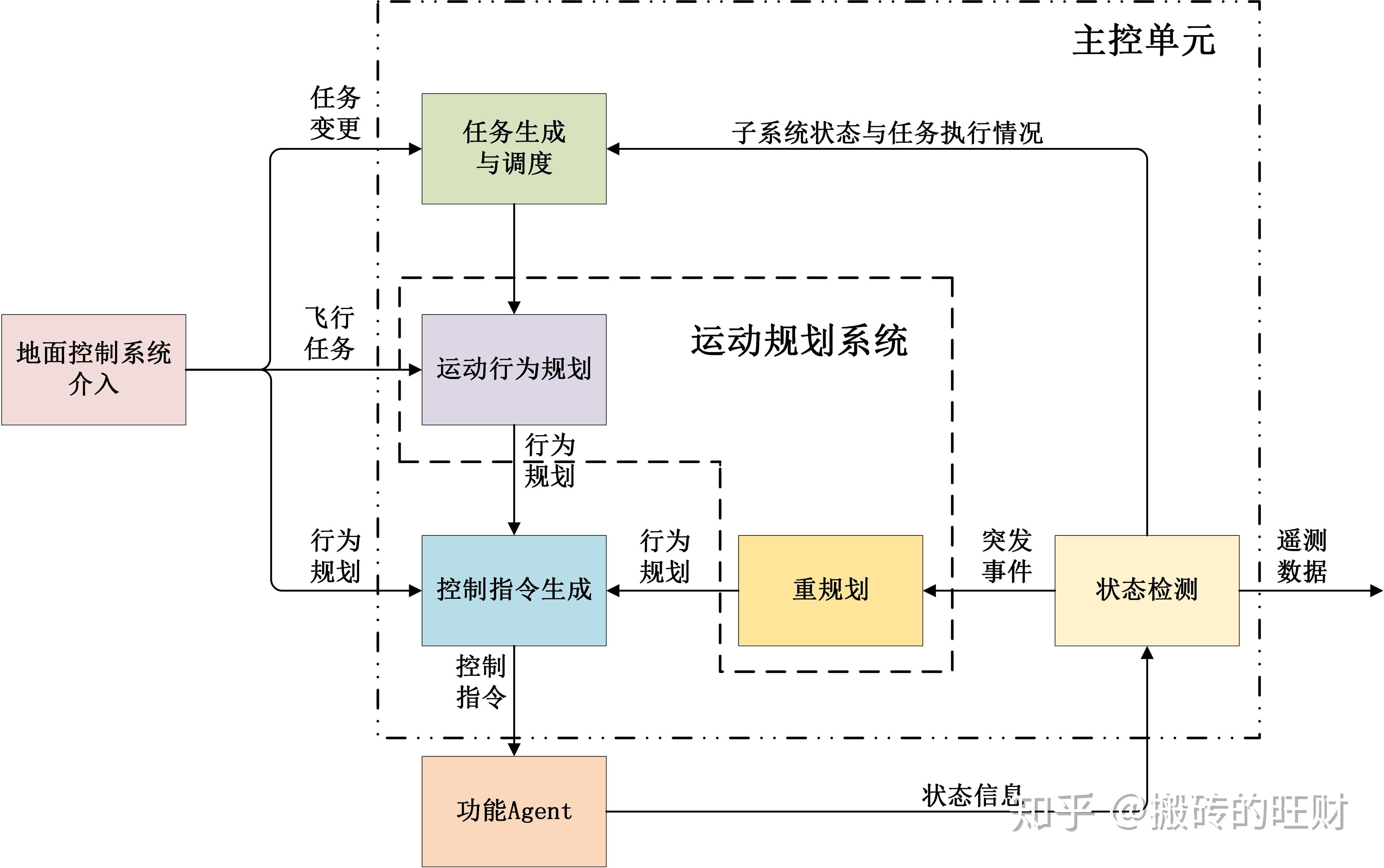
1 自主机器人近距离操作运动规划体系
图片尺寸2879x1506
多自由度机器人运动规划系统设计模型法
图片尺寸4032x2268
机器人学习abb机器人运动学分析与轨迹规划三维模型matlab代码word
图片尺寸1293x1125
规划使用机器人系统抬起重物的运动的方法
图片尺寸1000x749
工业机器人教学课件第四章工业机器人的运动轨迹规划
图片尺寸920x661
工业机器人运动规划与性能测试系统及其实现方法
图片尺寸1671x1839
3 轨迹规划 运动学分析是机器人轨迹规划和控制系统软件设计的前提
图片尺寸369x239
ai芯天下丨新锐丨视比特近亿元融资后,发力机器人运动规划 3d视觉产品
图片尺寸1000x470
机器人运动规划方法装置电子设备和存储介质与流程
图片尺寸923x1000
一种机器人行走与作业智能协同的运动规划方法
图片尺寸772x1000
工业机器人教学课件第四章工业机器人的运动轨迹规划
图片尺寸920x661