机械手腕部机构简图

一种机器人手腕构造及机器人
图片尺寸1068x1590
一种工业机器人手腕的制作方法
图片尺寸443x391
一种具有万向转动功能的机械手腕的制作方法
图片尺寸329x444
一种机器人机械手腕的制作方法
图片尺寸718x1000
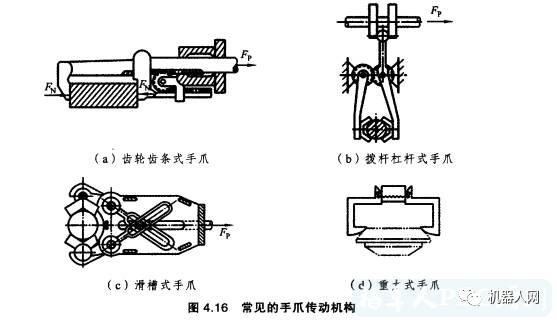
16所示为常见的机械手爪的传动机构,分别为齿轮齿条式手爪,拨杆杠杆式
图片尺寸557x322
cn209529328u_一种手术机器人机械手腕精准定位结构有效
图片尺寸1000x776
机械手的动作示意图
图片尺寸1080x810
cn101927498a_两自由度的机器人手腕失效
图片尺寸1444x1742
特别提供了一种工业机器人用三自由度机械传动手腕
图片尺寸722x1000
一种手术机器人机械手腕精准定位结构的制作方法
图片尺寸1000x778
cn109940658a_一种内置球形关节的机械手腕在审
图片尺寸948x1000
一种内置球形关节的机械手腕的制作方法
图片尺寸948x1000
机器人手腕体制造技术
图片尺寸1000x904
教材ppt 工业机器人腕部结构设计教材 通常也把手腕的翻转叫做roll,用
图片尺寸1080x810
com (1)执行机构:包括手部,手腕,手臂和立柱等 部件,有的还增设行走
图片尺寸1080x810
发明涉及机械设备技术领域领域,具体涉及一种工业机器人专用液压手腕
图片尺寸1000x653
一种机器人手腕体前端转动机构 - cn201711148934.
图片尺寸942x1000
机械手的手腕结构与手臂结构设cad图
图片尺寸920x1302
cn106078794a_工业机器人的中空手腕结构失效
图片尺寸1772x1638
机械手,其特征在于由水平旋转平台,大臂,竖直旋转平台,可回旋手腕以及
图片尺寸1000x764

















猜你喜欢:机械手腕部结构设计简单机械机构运动简图铆钉机构运动简图答案铆钉机构的机构简图制动机构运动简图机械机构简图机械机构运动简图机械爪机构简图机械结构简图简单机构简图结构图机械结构简图绘制机械结构简图机械创新设计机构简图机械结构简图运动缝纫机机构运动简图机械结构简图画法常见机械结构简图风扇摇头机构机械简图机械简图机械机构结构机械运动简图绘制鄂破式破碎机机构简图机械运动简图仿生机械鱼结构简图机械运动简图画法剪床机构运动简图机械机构运动动画图内燃机机构简图齿轮摆杆机构结构简图机构简图老式木屐图片陆浩明女朋友陈诗欣成长册爸爸妈妈的留言2021农机展怎么吊起来打厨房感应门头沿床边倒挂示意图雨婷的两只藏獒迷你世界玫瑰公主可爱猫耳女孩云门山画潘帅黄芷陶