机械手自由度图解

自由度机械手算法 已知p点坐标(x,y),l1,l2,求θ1?
图片尺寸450x361机器人的自由度
图片尺寸700x501
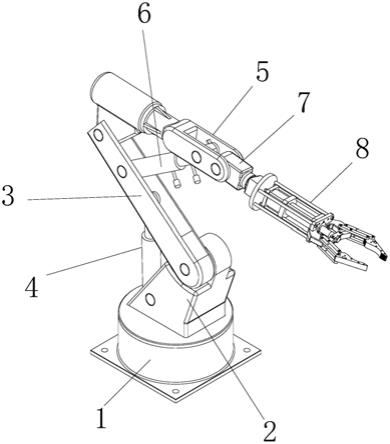
六自由度机械手
图片尺寸868x471
人机协作机械手的自由度
图片尺寸514x494
2.1 d-h描述法与连杆坐标系建立 例:三自由度机械臂.
图片尺寸1080x810
机械手运动学分析及仿真一是机械手末端连杆(手腕转轴)只有四个自由度
图片尺寸1004x567
机械手的动作示意图
图片尺寸1080x810
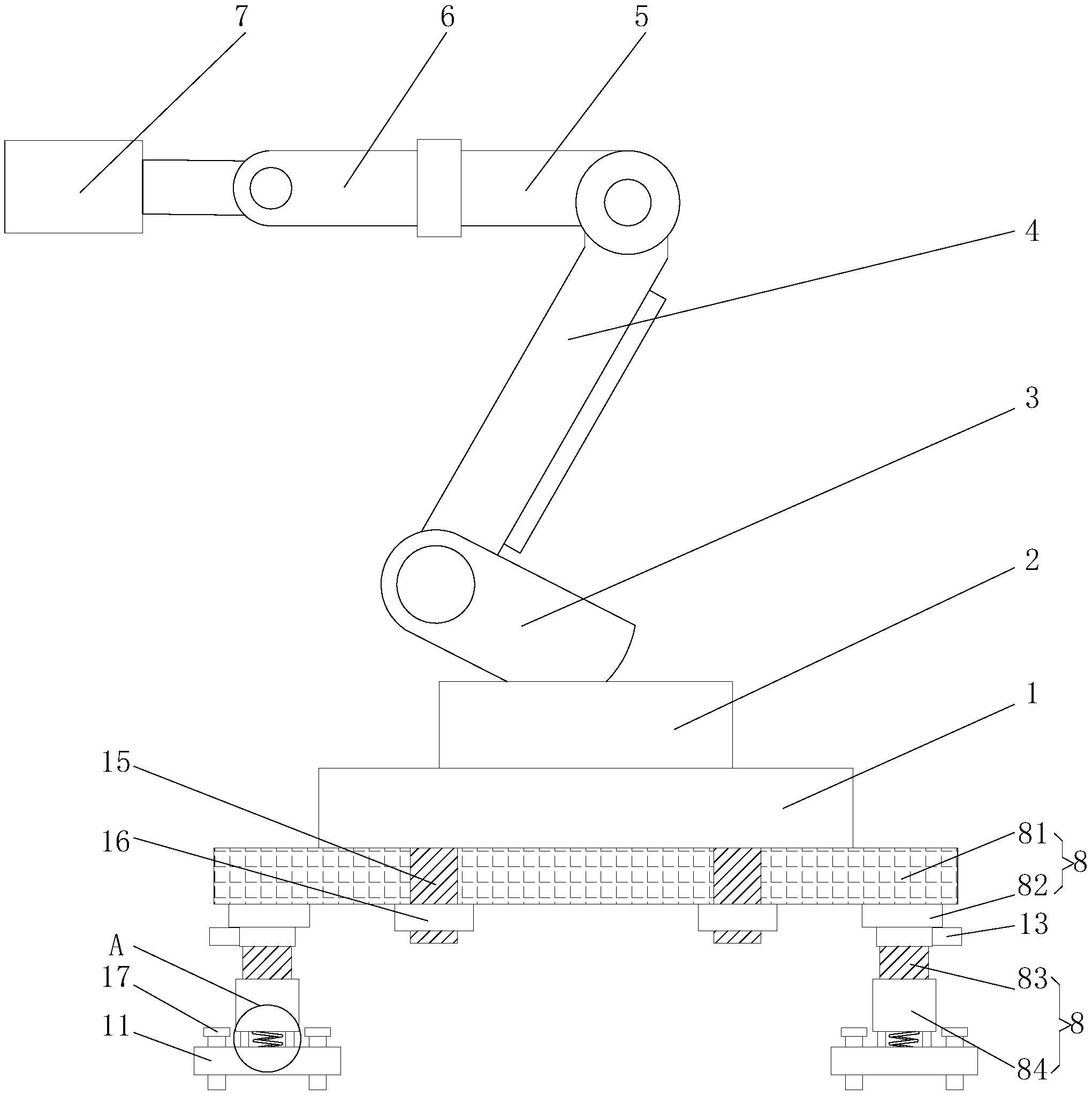
基于plc的五自由度气动搬运机械手研制
图片尺寸990x507在实际工作中,由于作业对象受到夹具的约束,所以,即使机械手的*度小于
图片尺寸700x658
六自由度机械臂轨迹规划与仿真研究_孙亮
图片尺寸1008x555
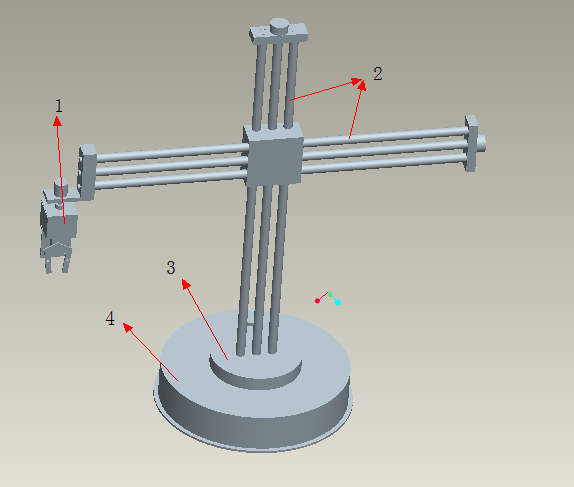
电镀线三自由度机械手的设计
图片尺寸372x496
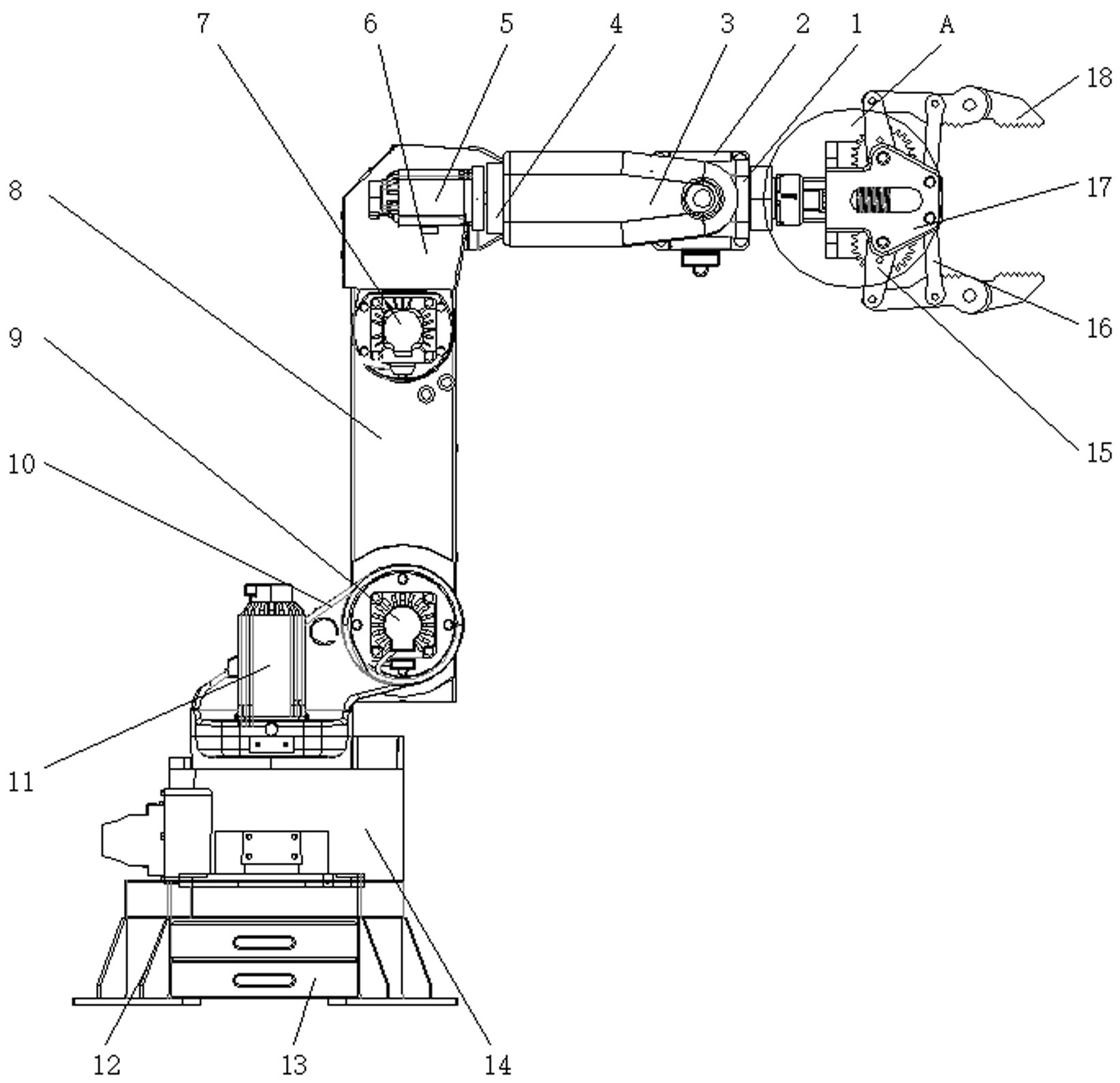
一种轻量型六自由度机械手臂
图片尺寸2040x2048
机器人的自由度
图片尺寸510x231
10所示为3自由度手腕的几种结合方式.
图片尺寸531x292
搬运机械手设计三自由度圆柱坐标型论文说明书二维图cad三维图proeppt
图片尺寸574x487
一种多自由度柔性液压机械手的制作方法
图片尺寸390x444
我校交通学院教师黄佩威的发明用于喷漆作业的自由度机械手获国家发明
图片尺寸632x600
机械手及其控制要求
图片尺寸725x512
一种机床用多自由度式机械臂
图片尺寸1644x1589
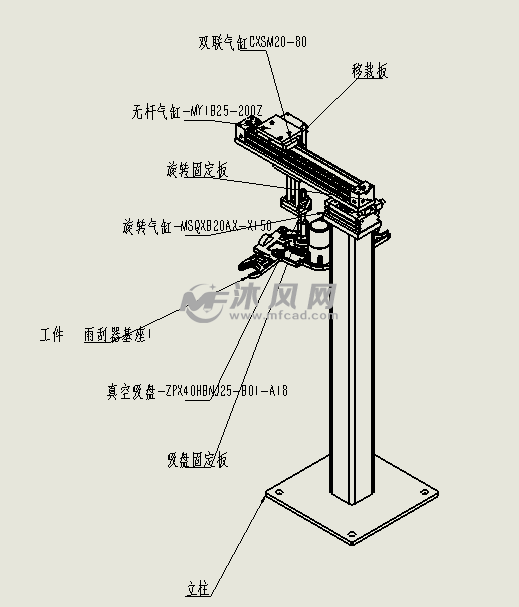
雨刮器基座吸盘式卸料三自由度机械手
图片尺寸519x607














猜你喜欢:机械手机构简图自由度六自由度机械手三自由度机械手四自由度机械手四自由度机械手三维图机械手运动简图自由度六自由度机械手臂简图四自由度机械臂图纸四自由度机械臂示意图四自由度机械臂机械臂自由度六自由度机械臂机械手机构运动简图简单机械手机构简图机械手简图六自由度机器人机械手的运动简图简单机械手设计图差动轮系自由度图解行星轮系自由度图解机械手结构简图机械手图片机构自由度工业机械手图片注塑机机械手机械手仿人机械手机构自由度计算疯狂机械手自由度王丽霞金的草书怎么写图片翁慧德壁纸闵玧其×你肉古筝曲大鱼海棠d调谱大佬请喝茶 动漫凶神恶煞的人图片2年级孤独的小螃蟹浪琴博雅系列九华山祇园寺图片烟灰色头发男青灰色上海市行政区划地图