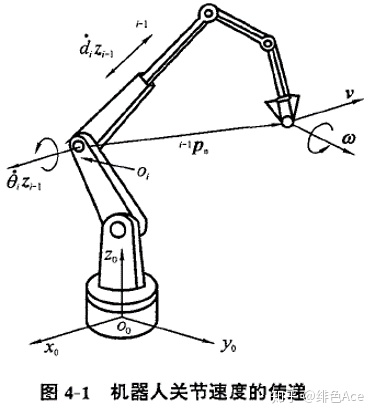
机械手运动简图自由度

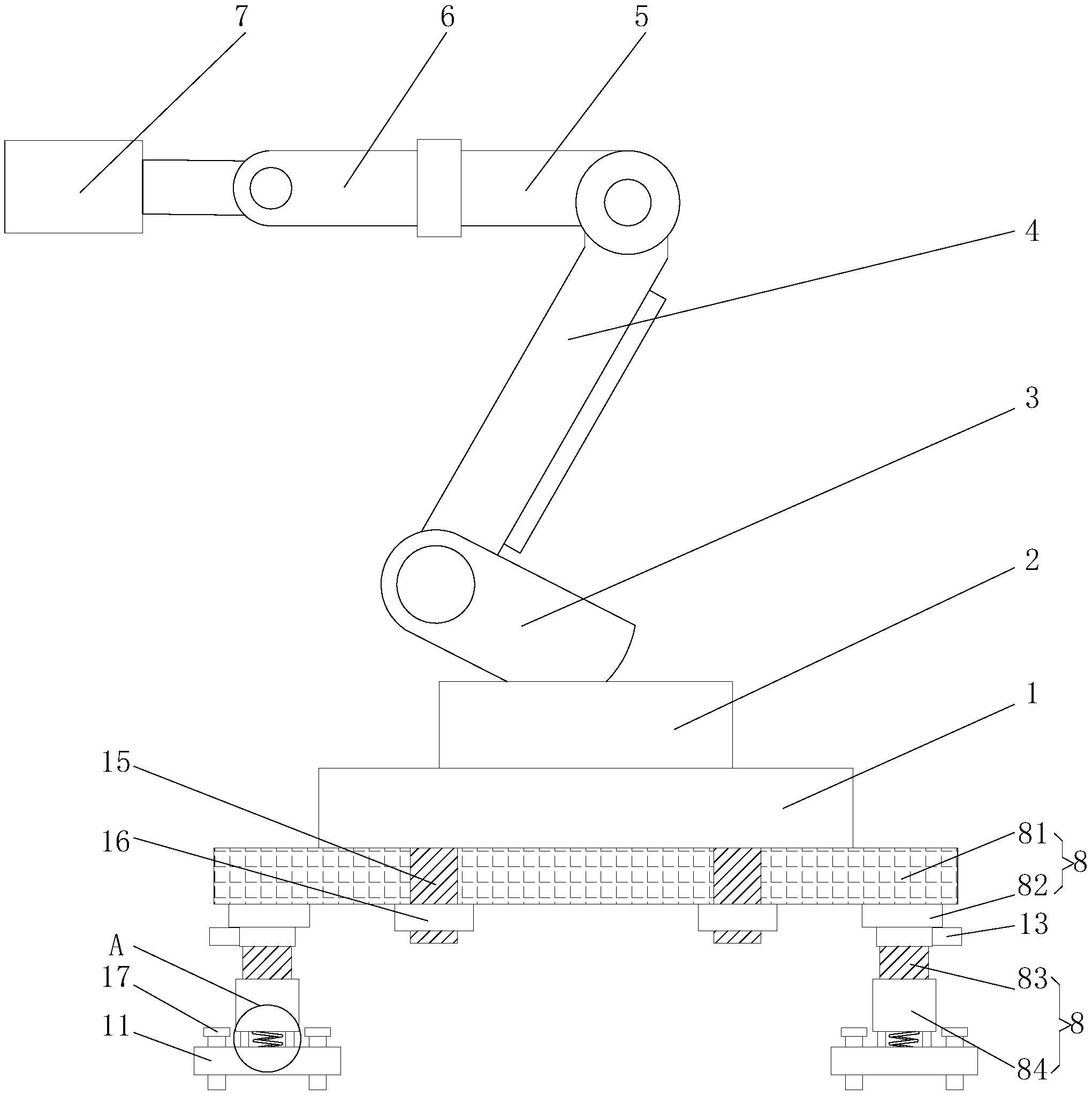
外骨骼式七自由度康复机械手的制作方法
图片尺寸1000x740
三自由度机械臂结构图figure the diagram of three
图片尺寸700x657
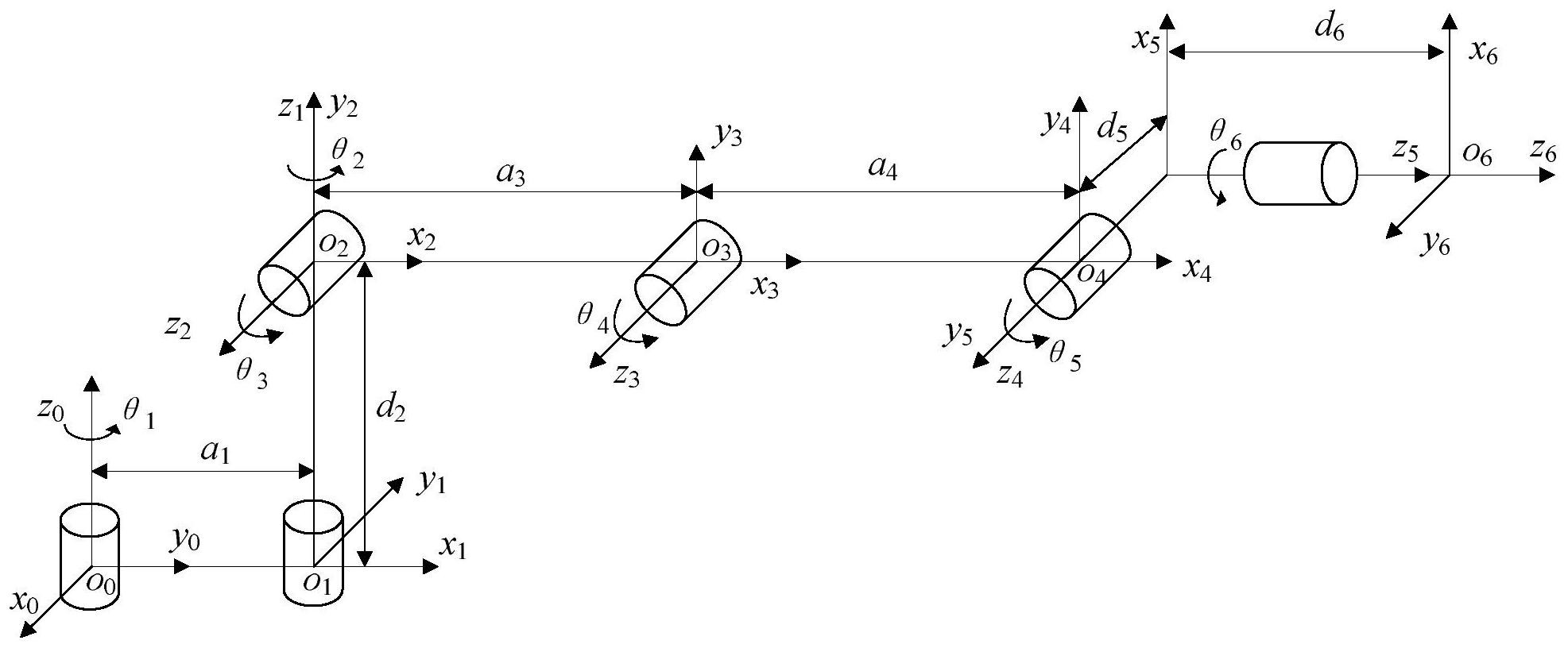
针对关节限位优化的7自由度机械臂逆运动学解法
图片尺寸700x534
为什么人机协作机械手是7个自由度,而不是6个?
图片尺寸454x484
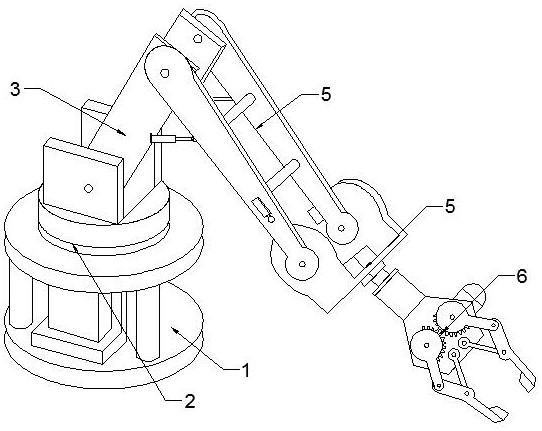
一种六自由度高枝抓握机械手-爱企查
图片尺寸542x431
六自由度机械手
图片尺寸868x471
cn103942427a_一类六自由度机械臂运动学逆解的快速简便求法有效
图片尺寸699x1000
一种六自由度机械臂逆运动学解析求解控制方法
图片尺寸1973x816
六自由度机器人(机械臂)运动学建模及运动规划系列(四)——轨迹规划
图片尺寸403x234
电镀线三自由度机械手的设计
图片尺寸372x496
六自由度机器人逆向运动学_【课程笔记】notes for robotics/机器人学
图片尺寸375x416
一种轻量型六自由度机械手臂
图片尺寸2040x2048
机器人的自由度
图片尺寸510x231
基于plc机械手控制系统设计【说明书 程序图片】
图片尺寸900x478
六自由度机器人逆向运动学机器人学导论第八章操作臂的机械设计一8189
图片尺寸505x470
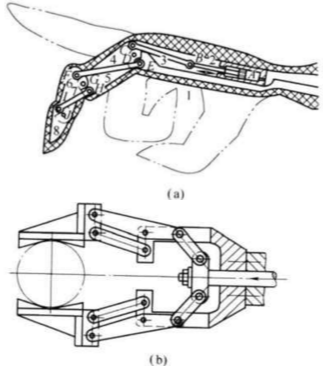
食指机构的机构运动简图(以手指8作为相对固定的机架),并计算其自由度
图片尺寸417x289
以上述两自由度机械臂为例.
图片尺寸372x398
一类六自由度机械臂运动学逆解的快速简便求法制造技术
图片尺寸697x1000
试绘制图示机械手的机构运动简图,并计算其自由度.
图片尺寸323x369
自由度机械手算法 已知p点坐标(x,y),l1,l2,求θ1?
图片尺寸700x562