点云图像

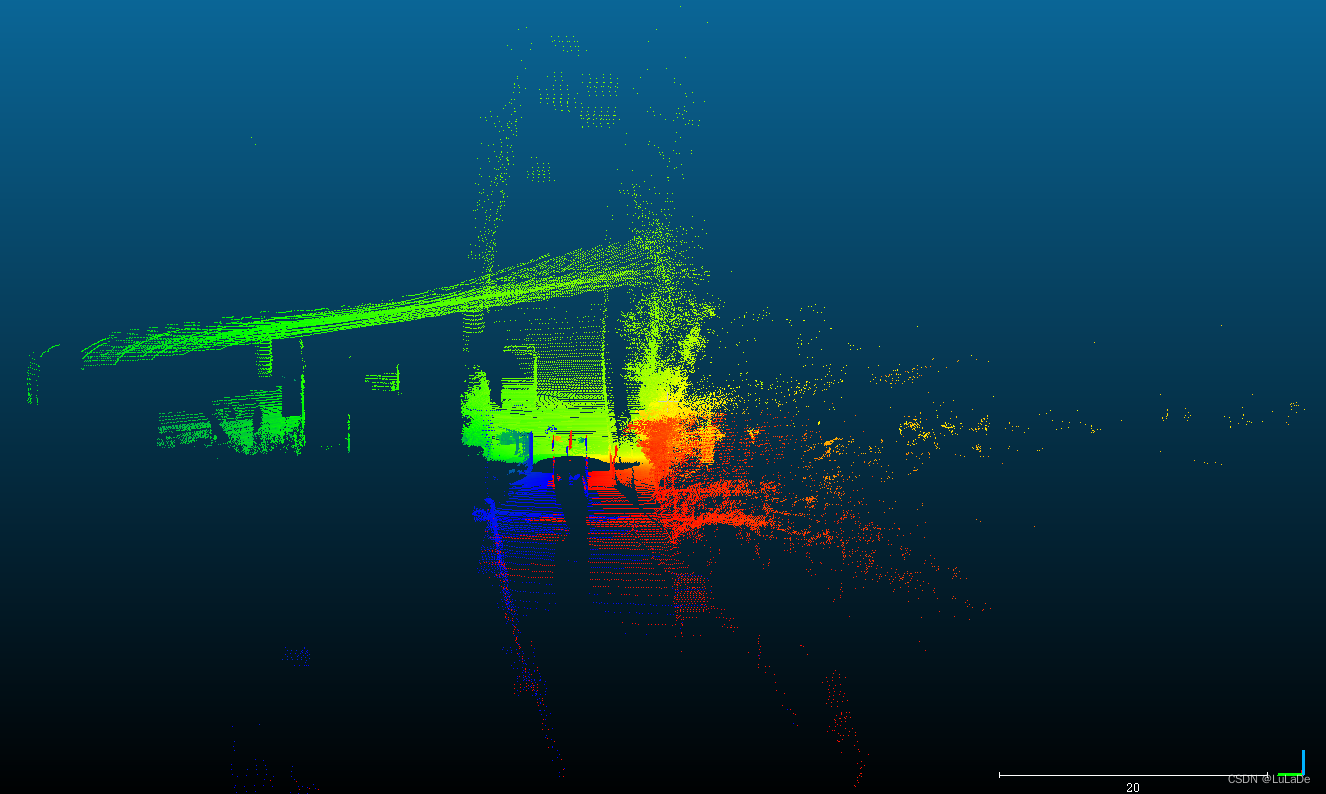
激光雷达点云与单幅图像配准/映射变为彩色点云_点云与rgb图像配准
图片尺寸1326x794
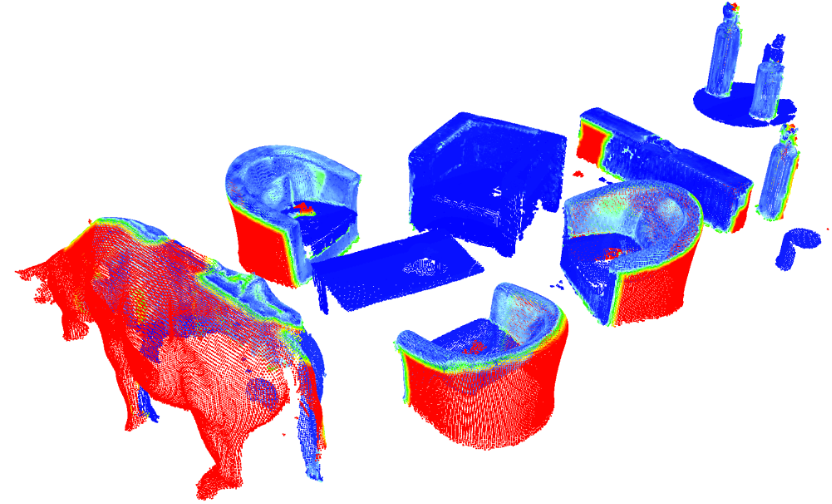
激光雷达点云
图片尺寸540x262
可视化激光雷达数据之深度图像和点云(range image & point cloud)
图片尺寸5120x2880
图像级1550nm光纤激光雷达震撼上市>128线标准分辨率点云展示1550nm
图片尺寸720x405
如何生成漂亮的点云渲染图?
图片尺寸1983x1446
禾赛at128的图像级点云表现
图片尺寸1384x466
最详细的自动驾驶3d点云数据集分享系列一|3d点云图像标注
图片尺寸832x504
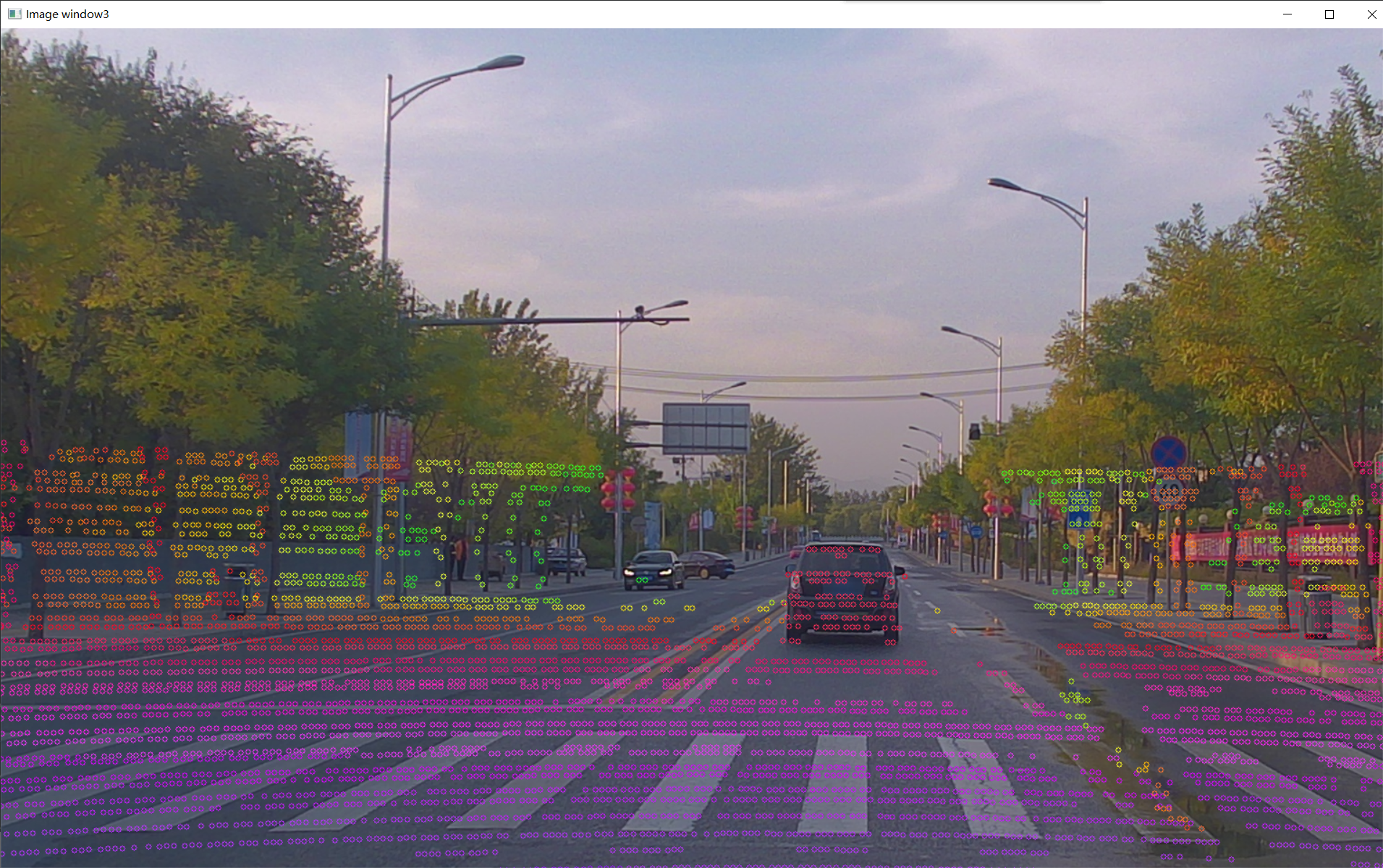
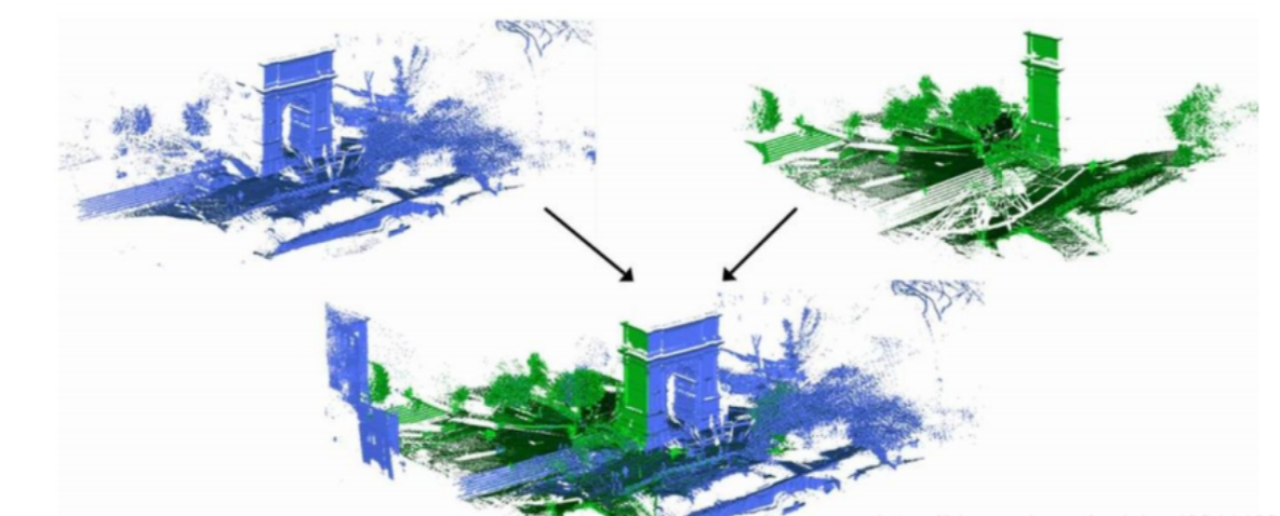
使用pclpy进行点云图像融合
图片尺寸1911x1200
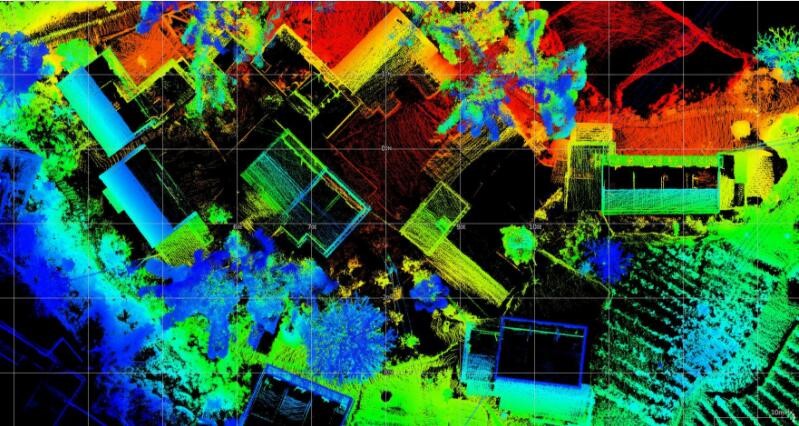
大疆l1激光雷达点云成果与可见光影像数据融合处理探索
图片尺寸2205x1169
无人机激光点云影像
图片尺寸799x426
point2model点云智能处理软件强势赋能新型基础测绘
图片尺寸800x496
点云
图片尺寸1080x809
3d点云之点云数据介绍
图片尺寸1280x516
arm linux上点云应用及依赖库(pcl,opencv等)编译
图片尺寸1268x500
at128图像级点云展示
图片尺寸640x263
pixels-to-points64:从无人机图像轻松生成点云
图片尺寸860x537
具体包括:1,机载lidar点云密度和倾斜摄影测量的密集图像匹配点云的
图片尺寸1896x967
标注案例分享:自动驾驶3d激光点云物体检测丨曼孚科技
图片尺寸1264x697
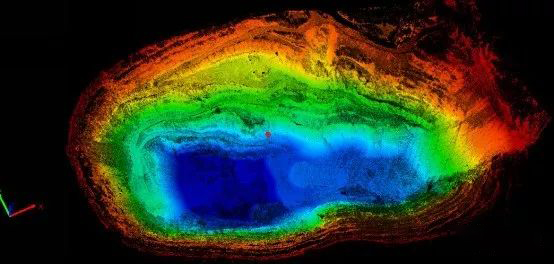
点云十大数据处理技术梳理及应用汇总
图片尺寸554x265
bin文件如何检测 - csdn
图片尺寸2493x1364