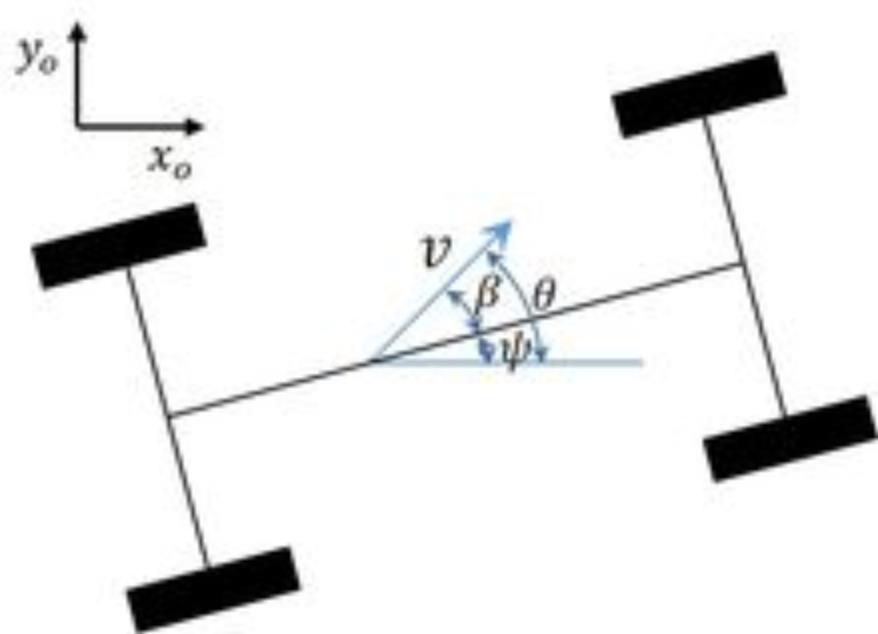
车辆航向角

车辆航向角
图片尺寸878x634
包括道路曲率,航向,坡度和横坡角.
图片尺寸1080x575
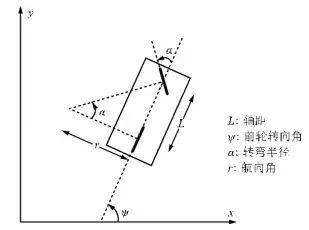
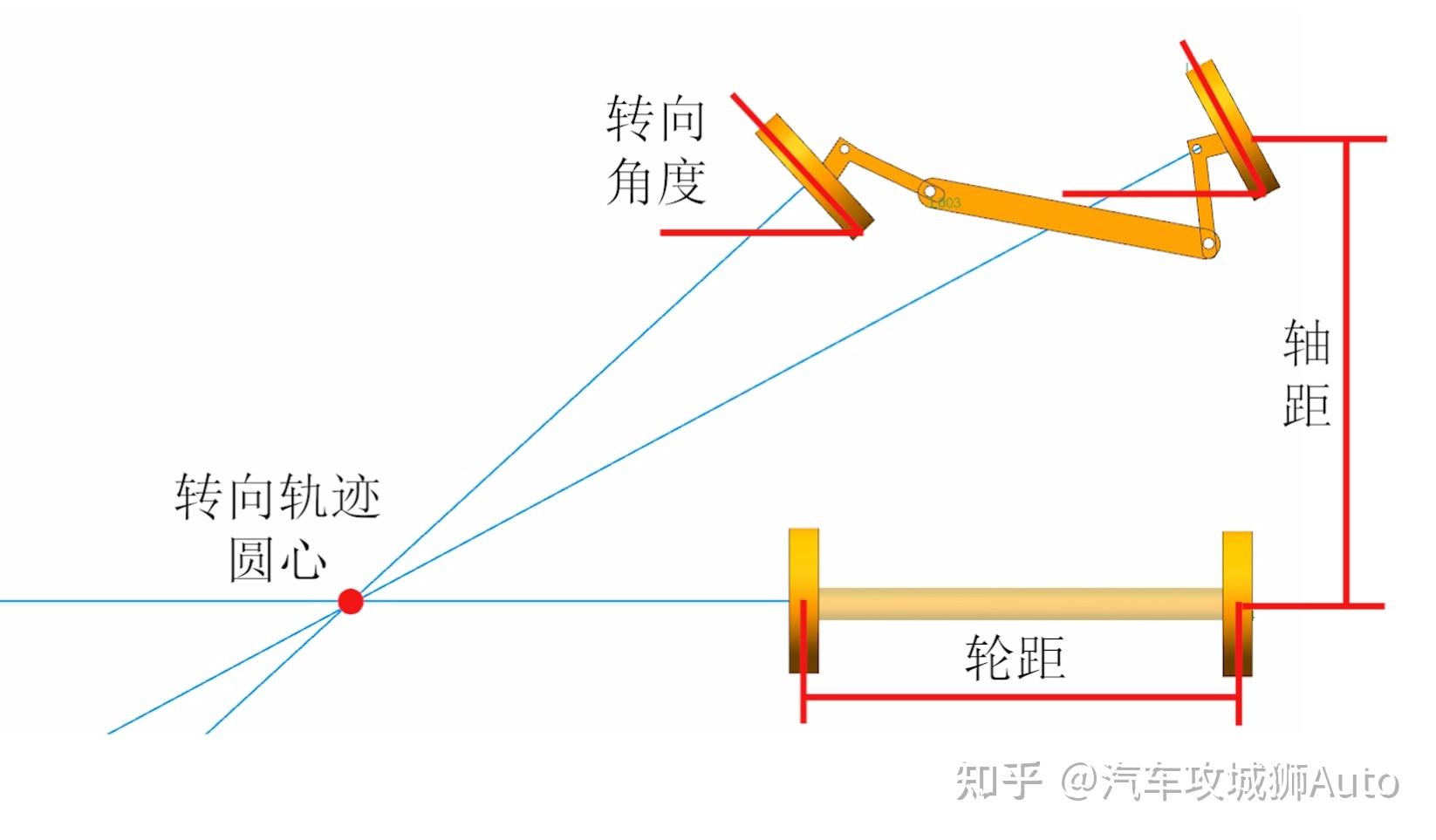
转向角的大小与车辆的实际尺寸和底盘设计密切相关.
图片尺寸640x438
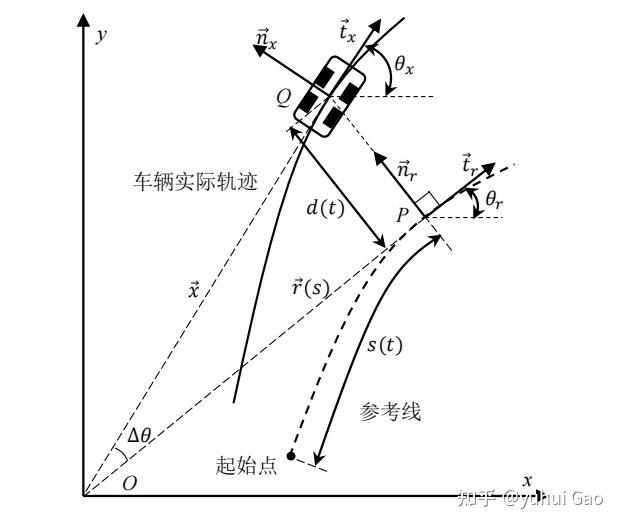
信息,分别是xr,yr,θr,kr,分别代表参考点的横纵坐标,参考点的航向角
图片尺寸620x526
基于rtkgnss和mems陀螺仪的车辆航向角测量技术
图片尺寸1575x750
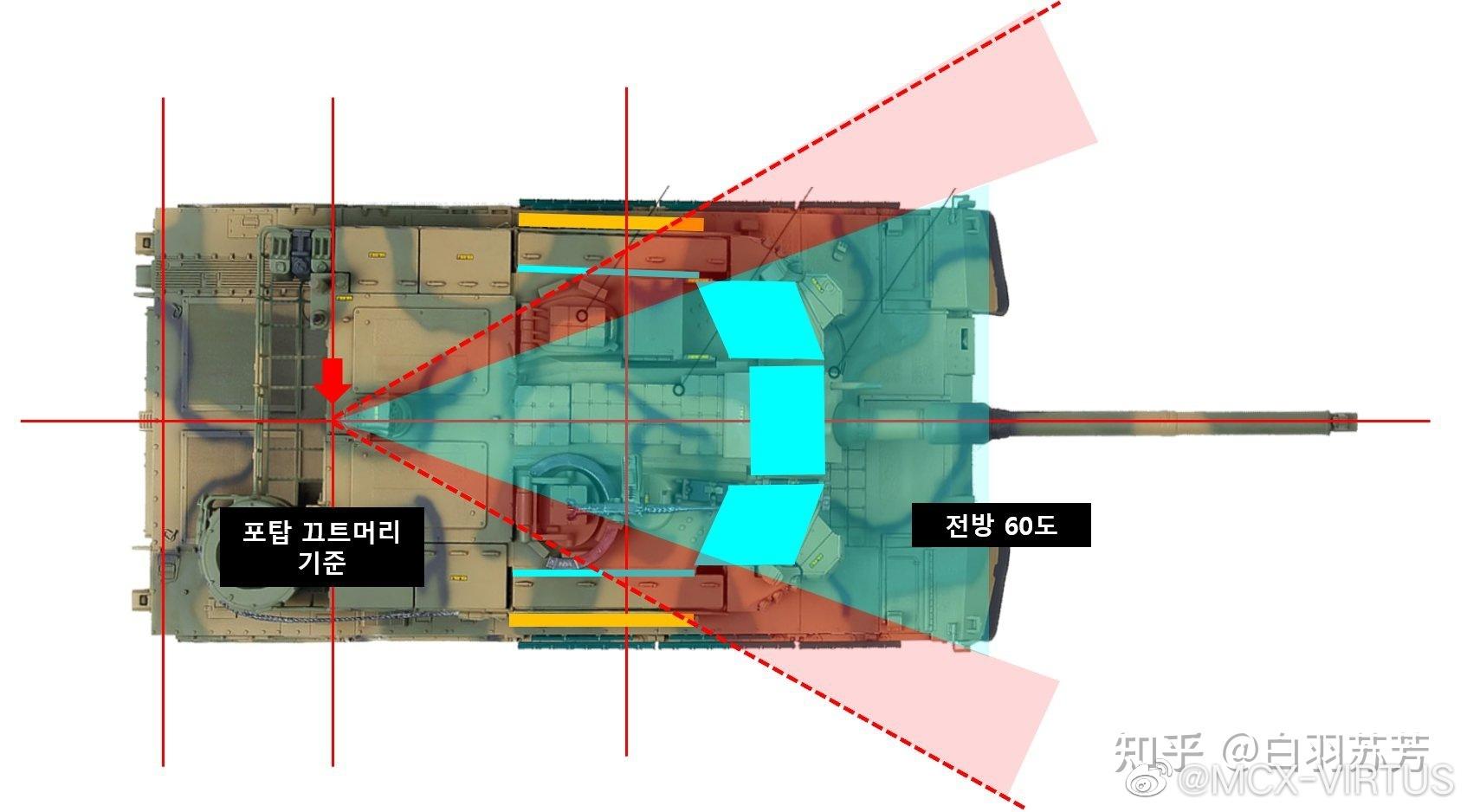
为何东亚的坦克大多不重视航向角防护? - 知乎
图片尺寸1694x938
如果方向盘不处于正中央位置,而是偏向某一角度,但车辆仍能够保持直线
图片尺寸500x570
自动驾驶
图片尺寸309x230
碰撞航向
图片尺寸638x357
6969以汽车后轮为原点建立直角坐标系,其纵向速度,横向速度和航向
图片尺寸1030x692
1 搜索方式a*算法:在二维网格中进行搜索,本质上就是把车辆简化为质点
图片尺寸641x494
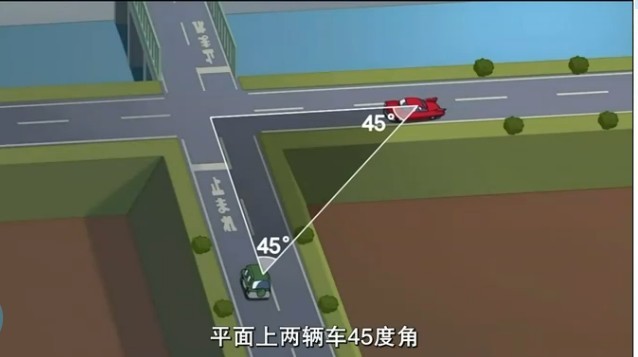
判断条件为:主车的航向角与远车的航向角偏差在一定范围内,并且车辆的
图片尺寸553x415
如果我们想减小汽车的转弯半径,主要的几个方法就是:增大前轮的转向
图片尺寸1646x963
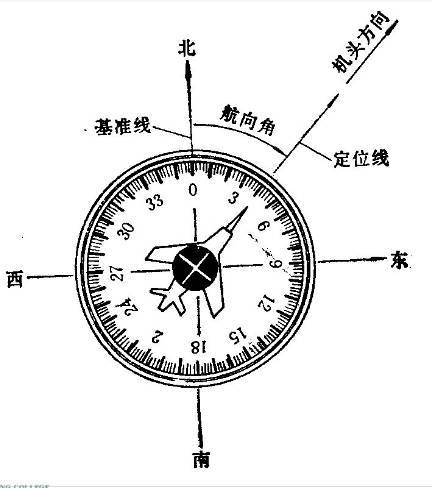
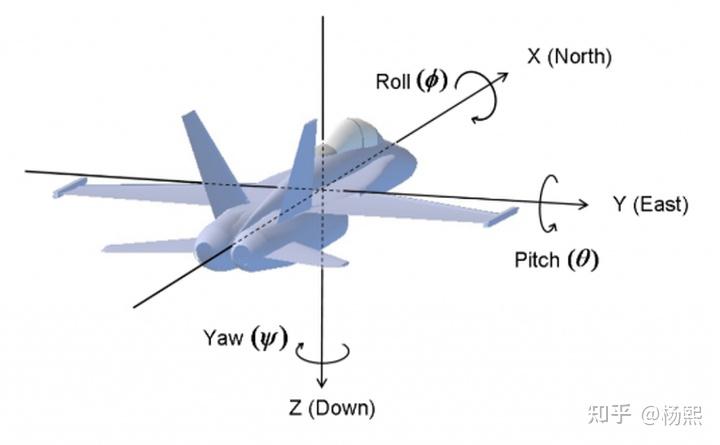
飞机航向是如何定义的?
图片尺寸432x488
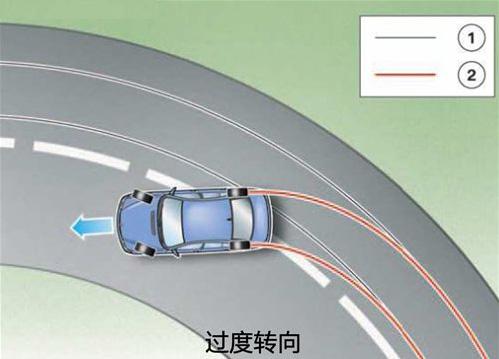
当汽车以高速进行转向时,由于车辆向前的惯性作用,会产生一个瞬时抵抗
图片尺寸499x359
车辆横向位置;a,b 分别为车辆质心到前后轴的距离;ψ 为车辆航向角
图片尺寸395x283
俯仰角,横滚角和航向角的说法
图片尺寸720x445
车辆航向角处理方法,装置,电子设备及自动驾驶车辆与流程
图片尺寸1914x775
年度改款怒花10亿?24款飞凡r7专治晕车
图片尺寸1080x793
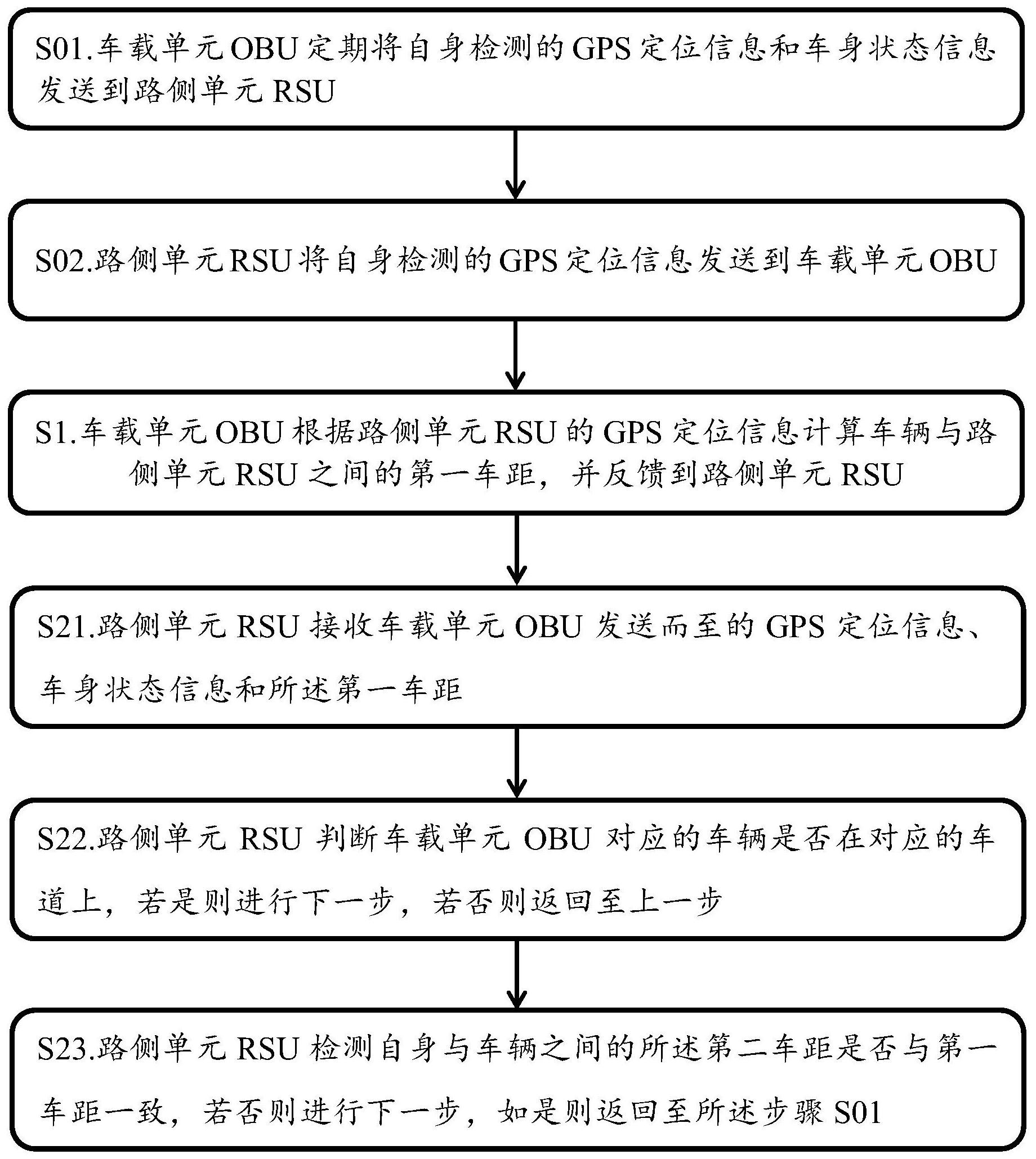
技术的gps高精定位方法,路侧单元rsu将自身测得的与车辆的第二车距,与
图片尺寸1840x2059