mpu6050姿态

超详细陀螺仪mpu6050模块输出姿态角(有完整版源码)
图片尺寸650x489
mpu6050姿态解算
图片尺寸316x170
其实我们主要是想通过mpu6050得到欧拉角和四元数(可
图片尺寸1080x1640
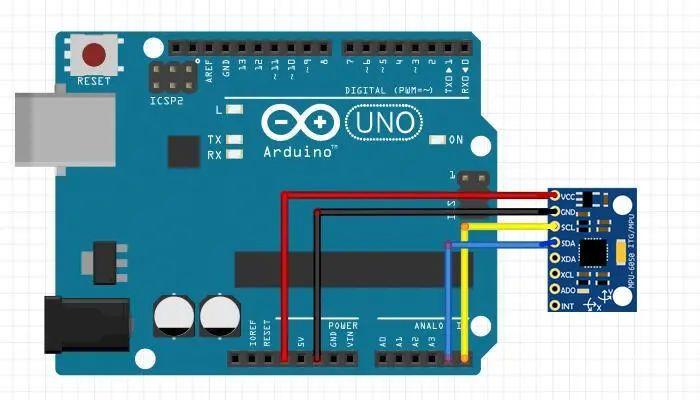
arduino提高篇16六轴姿态mpu6050
图片尺寸580x428
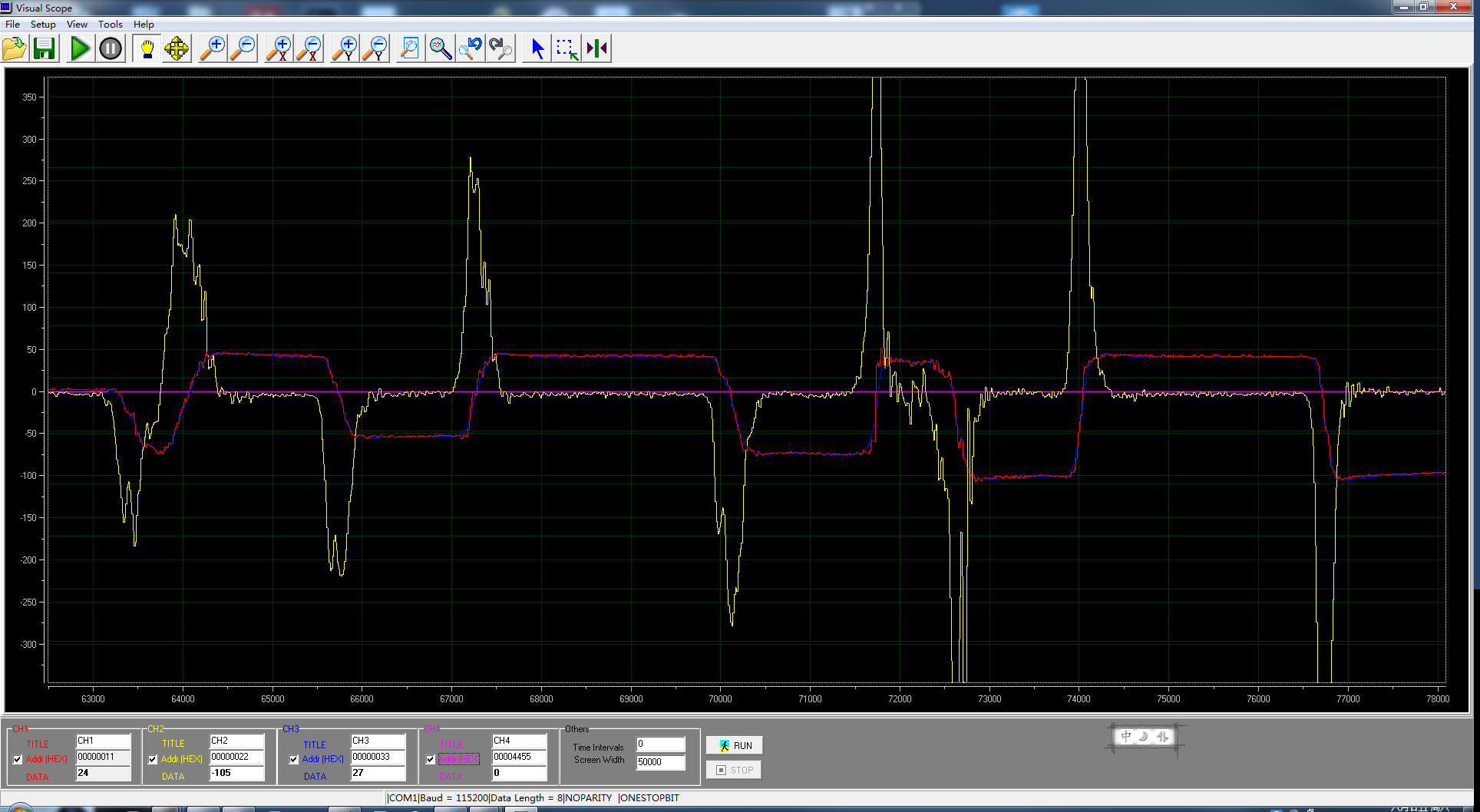
mpu6050姿态解算和数据融合
图片尺寸1928x1058
mpu6050姿态解算方式1dmp
图片尺寸619x333
arduino提高篇16六轴姿态mpu6050
图片尺寸700x525
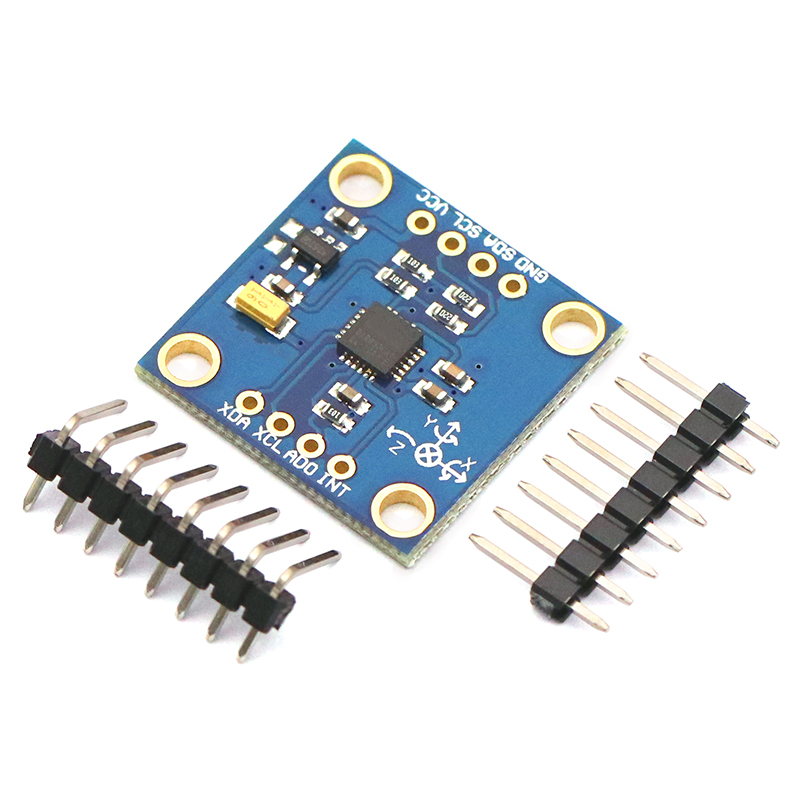
6轴姿态 mpu6050模块 陀螺仪 dmp引擎 卡尔曼 加速度计 倾角仪
图片尺寸800x800
arduino提高篇17mpu6050姿态解算
图片尺寸630x390
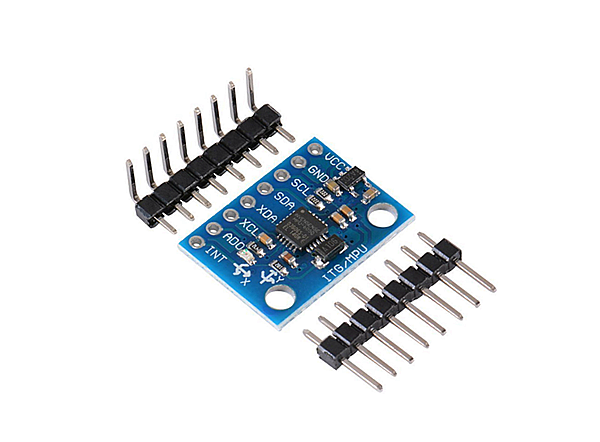
mpu6050 模块 3三轴陀螺仪 加速度倾斜度角度传感器模块6轴姿态 - 痕
图片尺寸800x800
rtthread实战笔记mpu6050使用详解及dmp姿态解算
图片尺寸1032x469
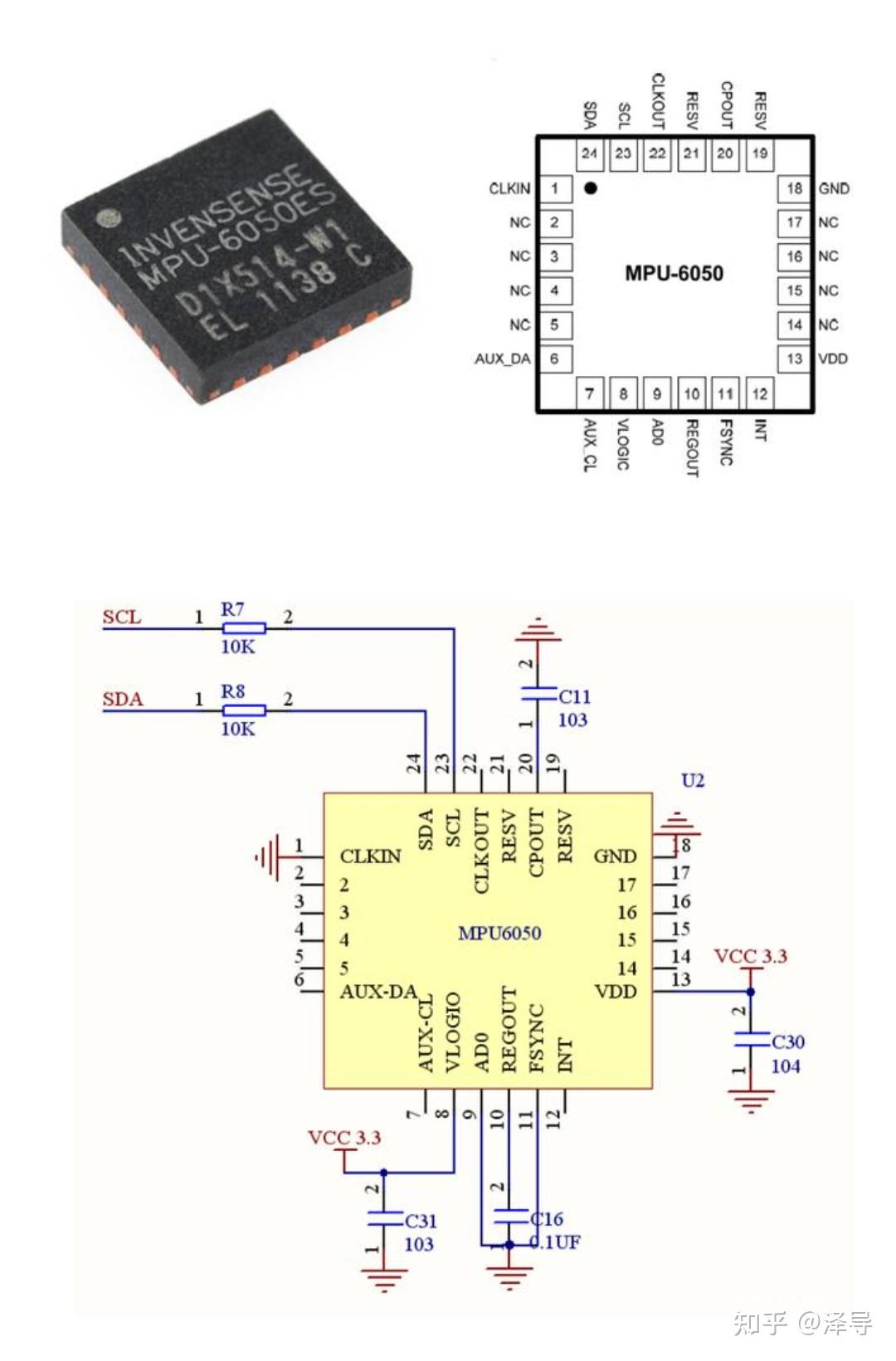
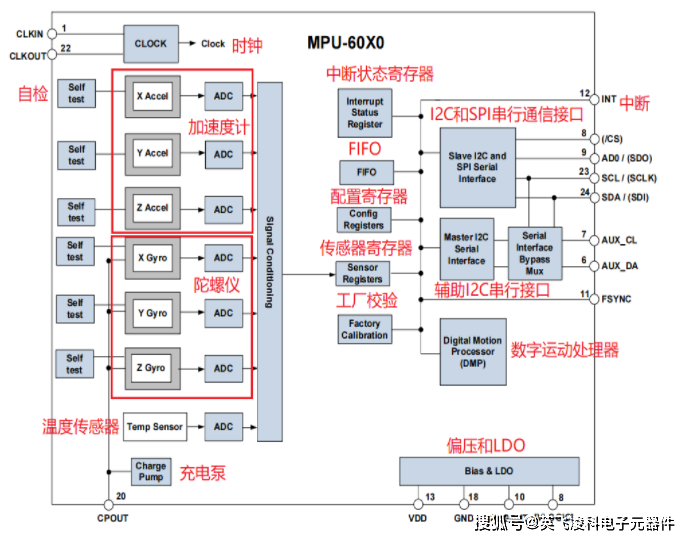
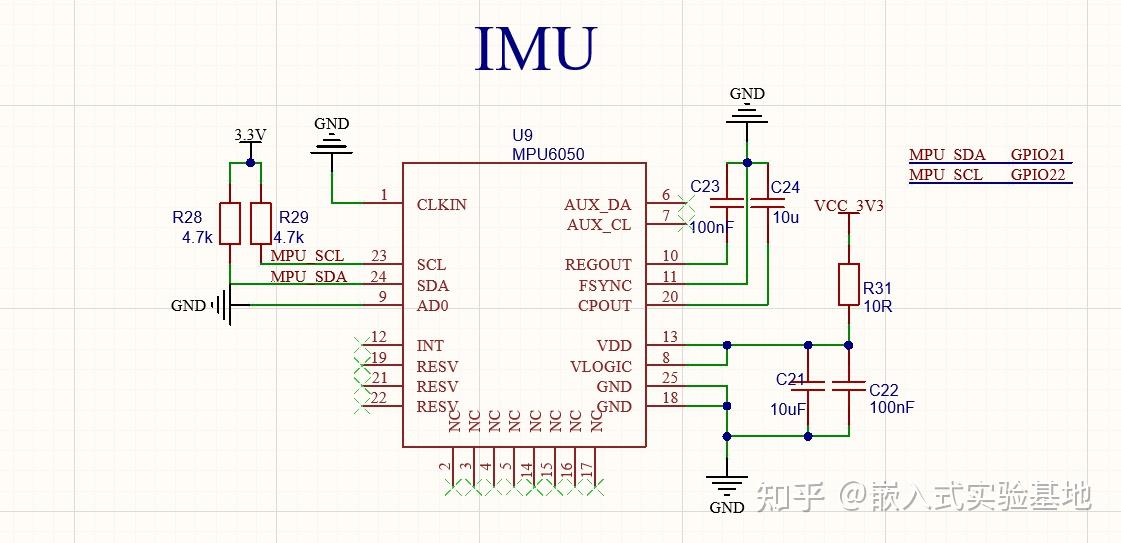
四,mpu6050系统结构图dmp是mpu6050芯片中的数据处理
图片尺寸689x540
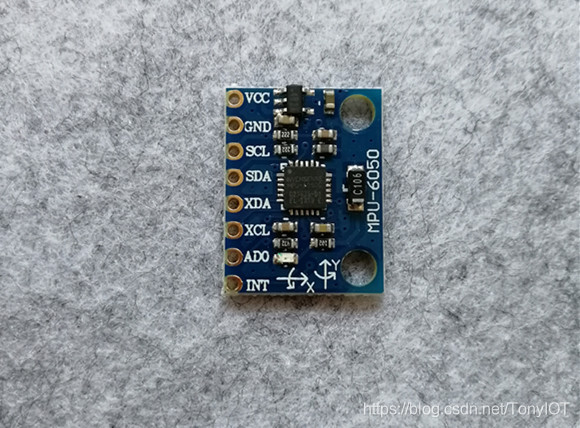
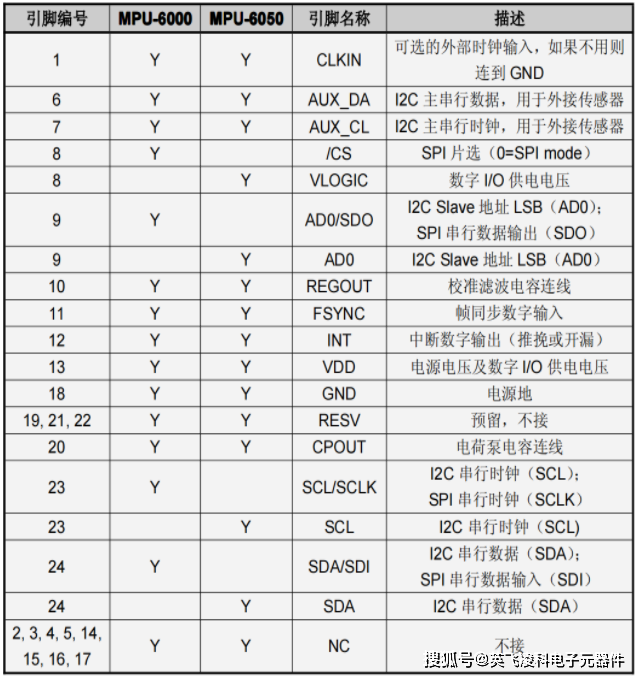
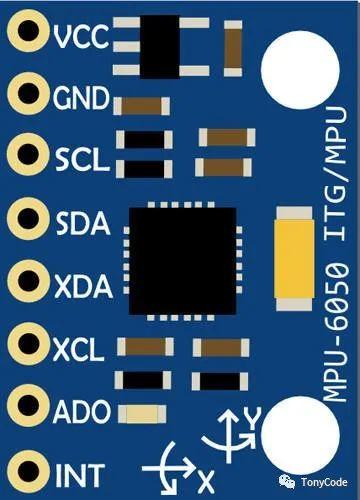
表 1 引脚输出与信号描述图 1 mpu6050引脚图六,m
图片尺寸639x677
【esp32arduino mpu6050姿态解算】自制无人机学习笔记2 platformio
图片尺寸600x442
arduino uno mpu6050 陀螺仪 运用卡尔曼滤波姿态解算实验
图片尺寸650x571
arduino提高篇16六轴姿态mpu6050
图片尺寸360x500
mpu6050姿态解算1dmp方式
图片尺寸1920x1080
arduino提高篇17mpu6050姿态解算
图片尺寸700x400
欢迎文末留言区或者公众号后台回复"mpu6050"即可获取
图片尺寸1121x543
欢迎文末留言区或者公众号后台回复"mpu6050"即可获取
图片尺寸943x493









猜你喜欢:mpu6050mpu6050芯片mpu6050封装mpu6050传感器mpu6050接线mpu6050原理图mpu6050引脚图mpu6050接线图mpu6050电路图605055mpu6050模块原理图605016mpu6050原理图电路MPU6050mpu6050与stm32连接图605077姿态ig姿态高姿态a6050拆机图三星a6050浙大自然605080姿态的意思姿态刘志豪三星a6050参数三星a6050拆机姿态优美姿态直播三星a6050拆机图三星a6050拆机图解小学英语ppt背景模板漫画人物女 美少女恐怖素描 简单牙神经坏死怎么办历代服饰照片知识孙耀庭拍净身照片别墅外立面效果同等身高男女骨架对比东成手电钻价格马爹利vsop1715旧装黄衬衫搭配图片欣赏阿玛尼满天星男表图片