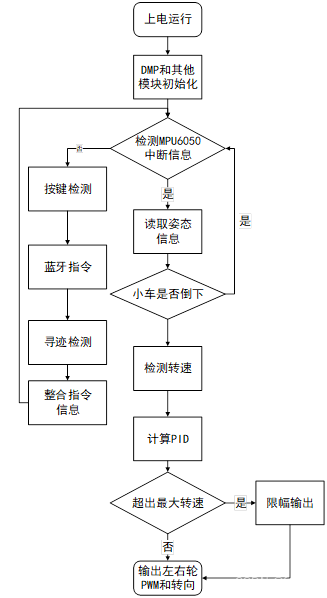
mpu6050程序流程图

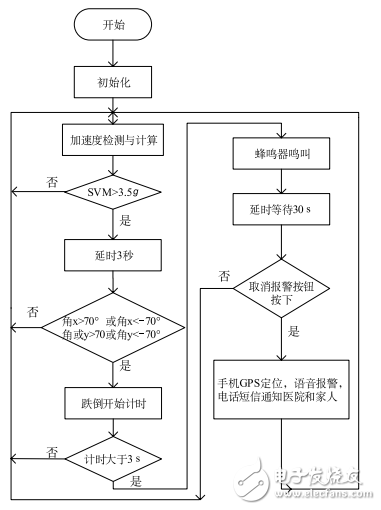
跌倒判断算法流程图fig.
图片尺寸962x1124
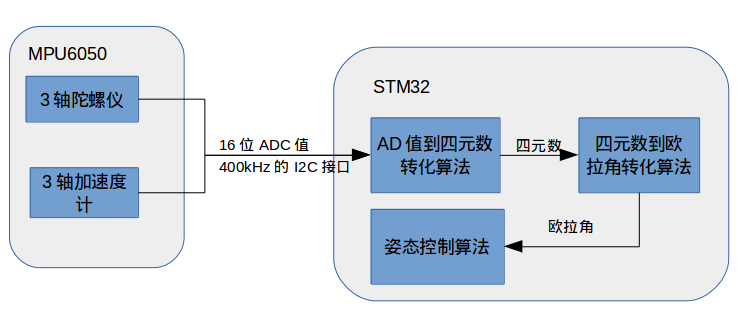
它采用stm32f103c8作为微控制器,利用mpu6050感应无
图片尺寸685x1008
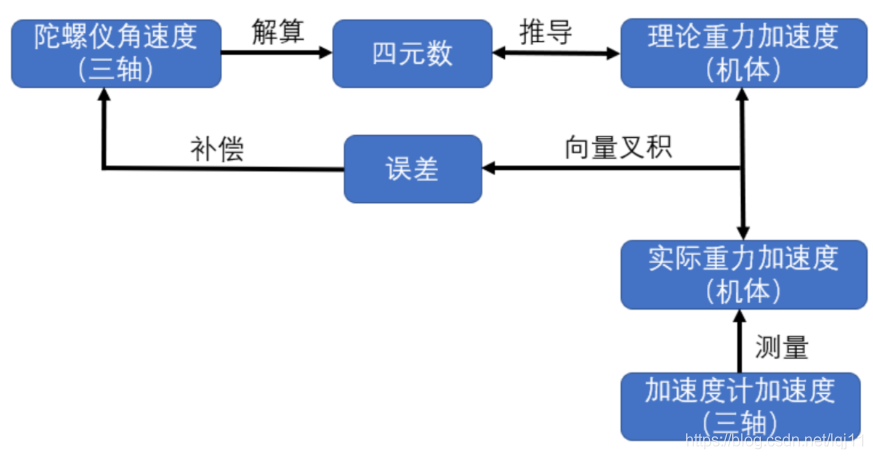
mpu6050 获取角度理论推导(二)---6轴融合算法
图片尺寸650x549
基于mpu6050的老年人跌倒监测系统设计全文
图片尺寸381x510
mpu6050姿态解算mahony互补滤波
图片尺寸873x459
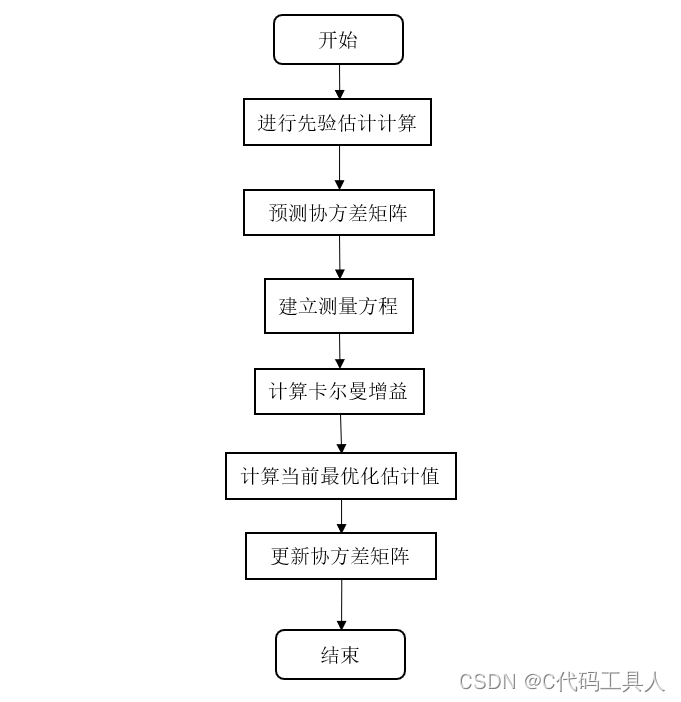
【算法】基于stm32的mpu6050卡尔曼滤波算法(入门级)
图片尺寸681x702
github - dyfcalid/stm32-car-mpu6050-bluetooth-u
图片尺寸667x818
github - tan-zy/stm32-car-mpu6050-bluetooth-ul
图片尺寸924x626
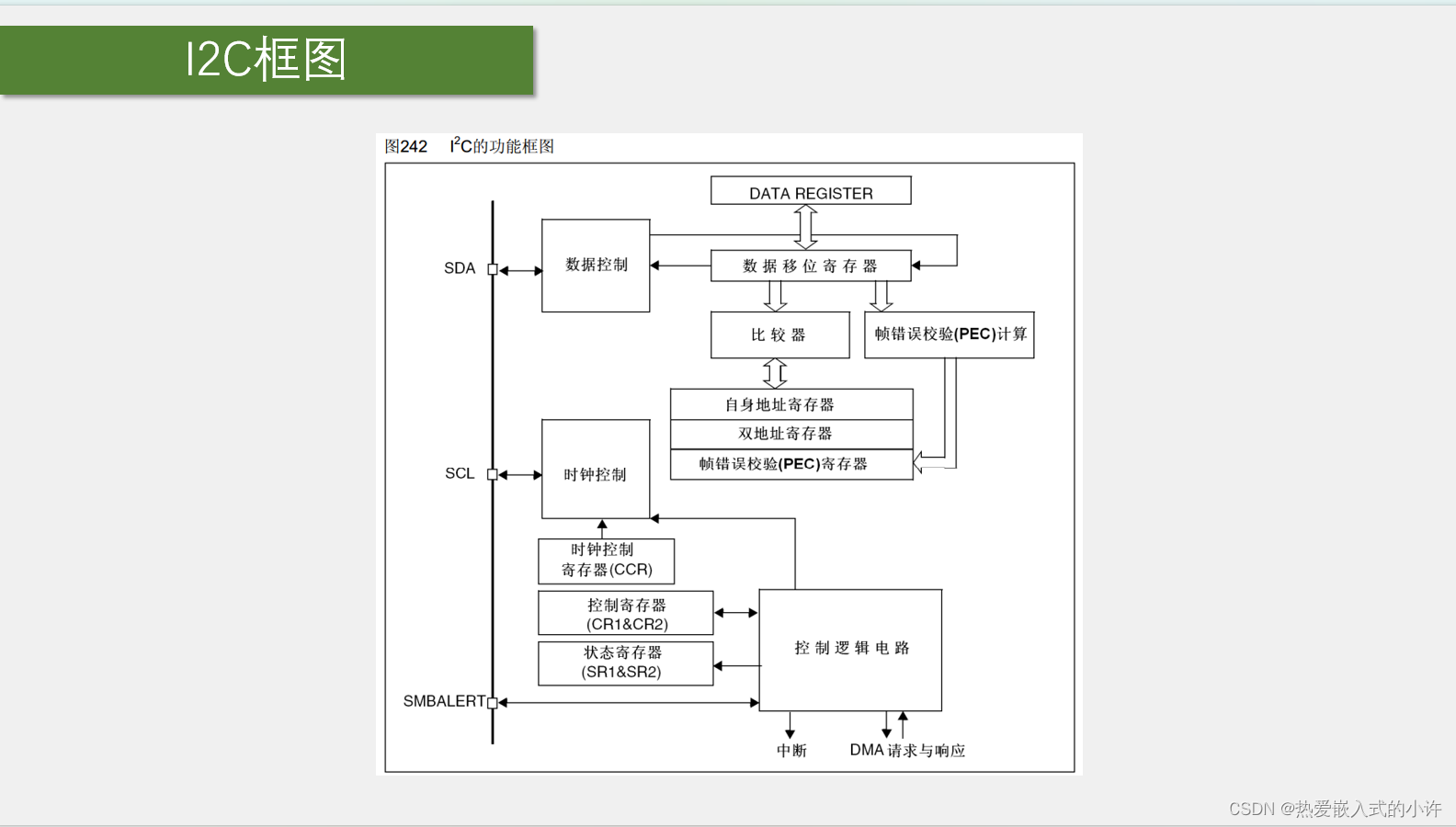
i2c通信
图片尺寸1584x900
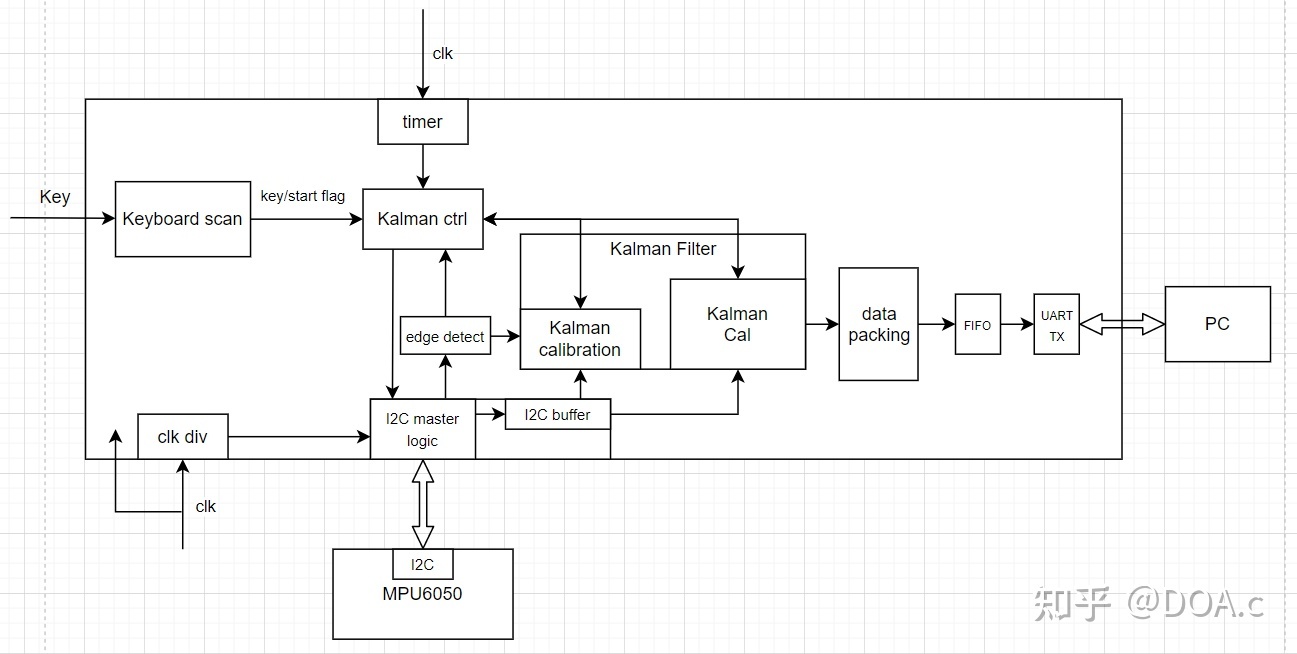
fpga实现卡尔曼滤波算法——融合mpu6050的acc和gyro
图片尺寸1297x654
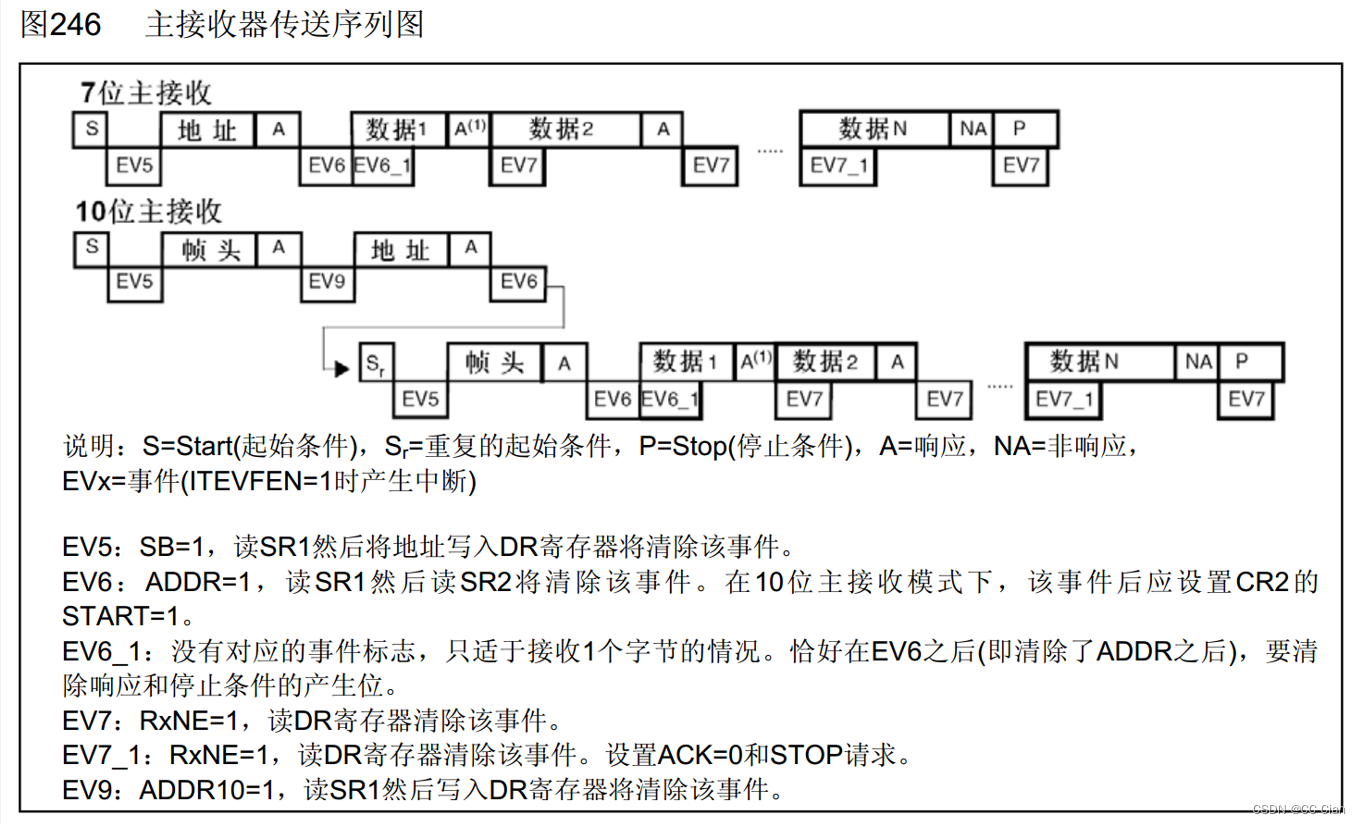
主机发送和接收的流程图
图片尺寸661x671
图6 主控板程序流程图5 结论本作品通过采用mpu6050传感器及压敏电阻
图片尺寸574x619
姿态解算简介
图片尺寸748x319
stm32硬件i2c通信外设
图片尺寸1361x824
单片机毕设项目基于stm32的人体健康状态检测系统
图片尺寸590x884
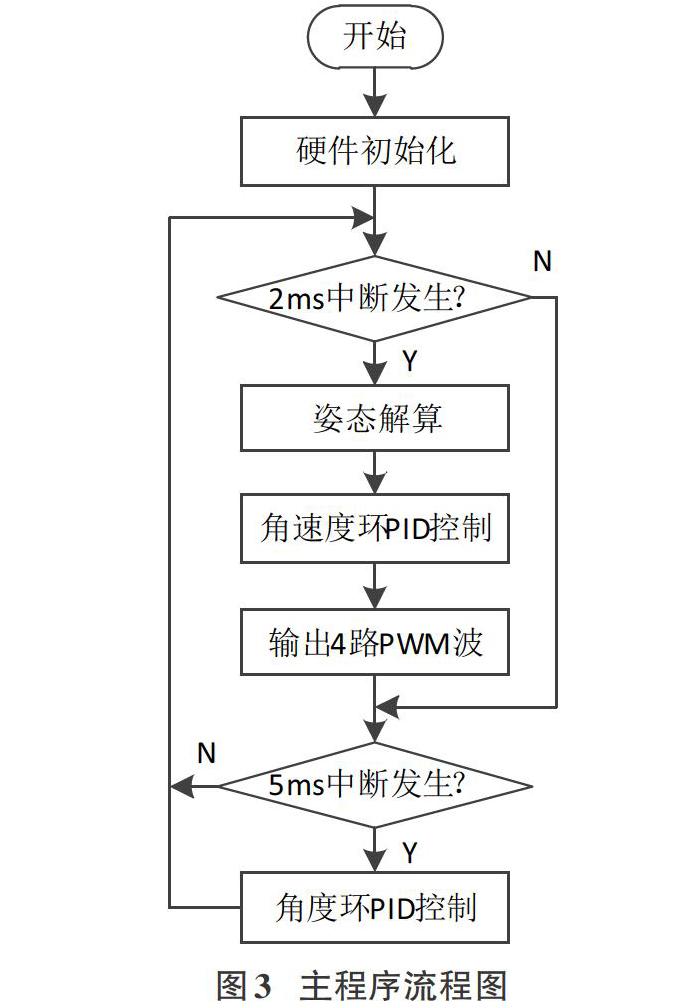
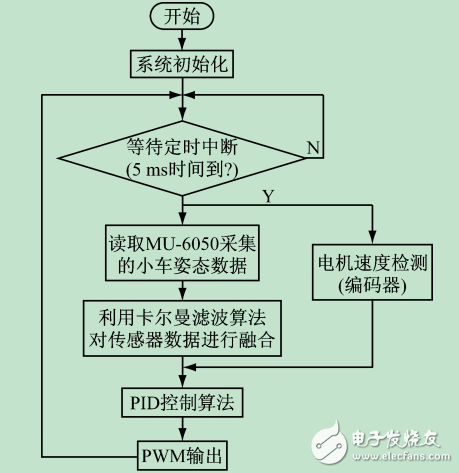
1,系统的总体流程设计本系统的主程序流程图如图4所示,主要由初始化
图片尺寸459x473
(保姆级教程)基于stm32和mpu6050的平衡车制作报告
图片尺寸327x598
应用程序开发有哪些支出_(应用程序开发需要具备什么技术)
图片尺寸2400x2786
关于mpu6050姿态解算的一阶互补滤波方法从原理到代码实现
图片尺寸1022x298
mpu开机初始化程序流程图 结语
图片尺寸391x475