rosgazebo

在机器人操作系统(ros)-中使用带gazebo的opencv第1部分-显示实时视频
图片尺寸1920x1080
ros的迅速崛起,也不断吸收更多第三方工具的加入,比如gazebo,matlab
图片尺寸687x319
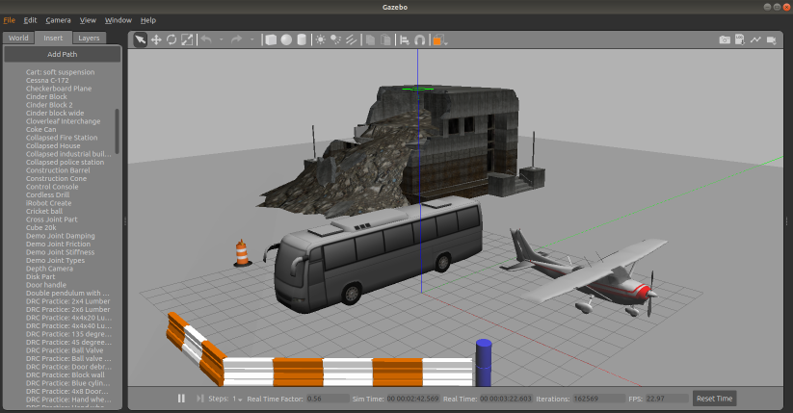
ros1中gazebo案例都有哪些机器人呢(noetic2022)_zhangrelay的博客
图片尺寸1148x716
rosgazebosdf规范文档与模型资源
图片尺寸793x413
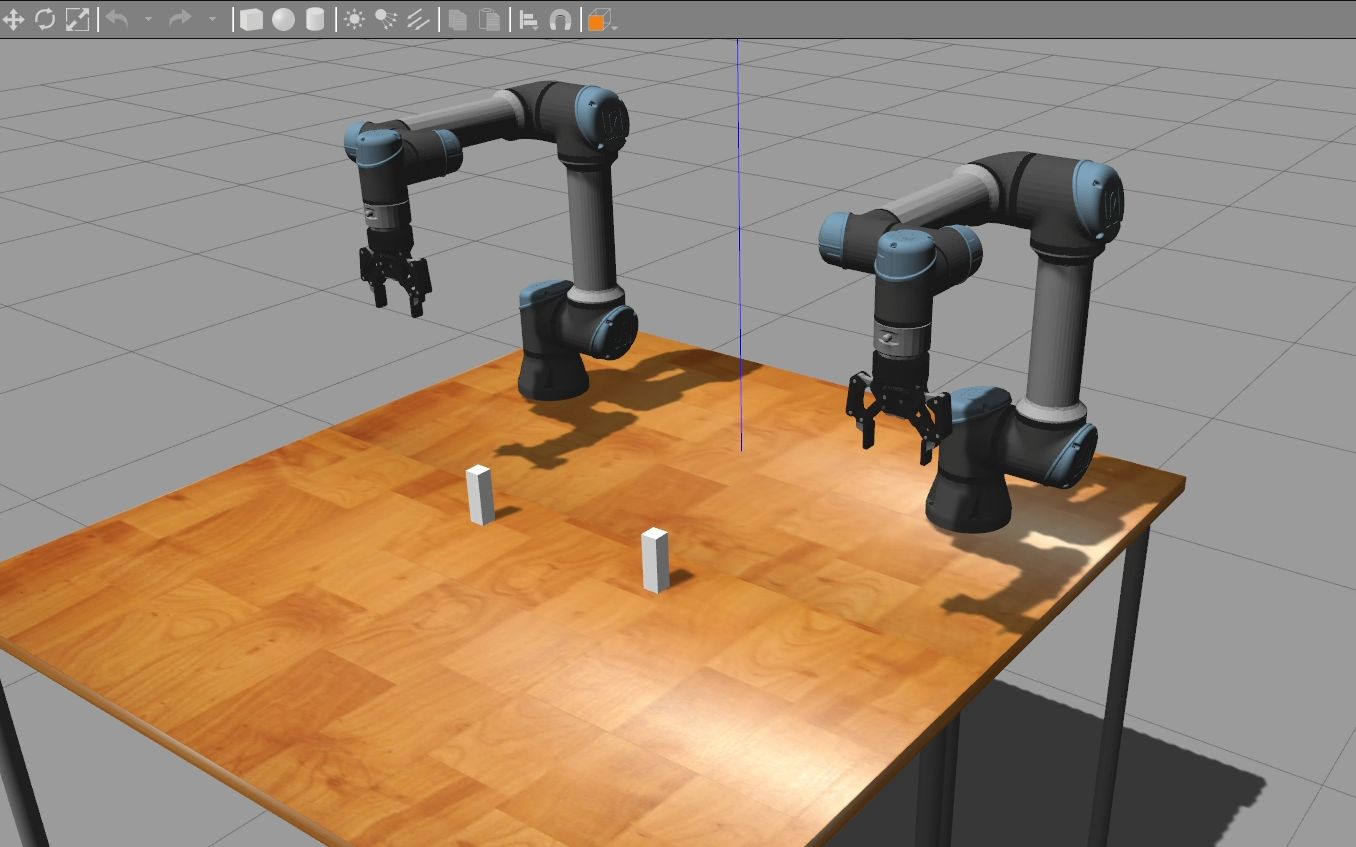
ros2 gazebo双ur5e机械臂抓取
图片尺寸1356x847
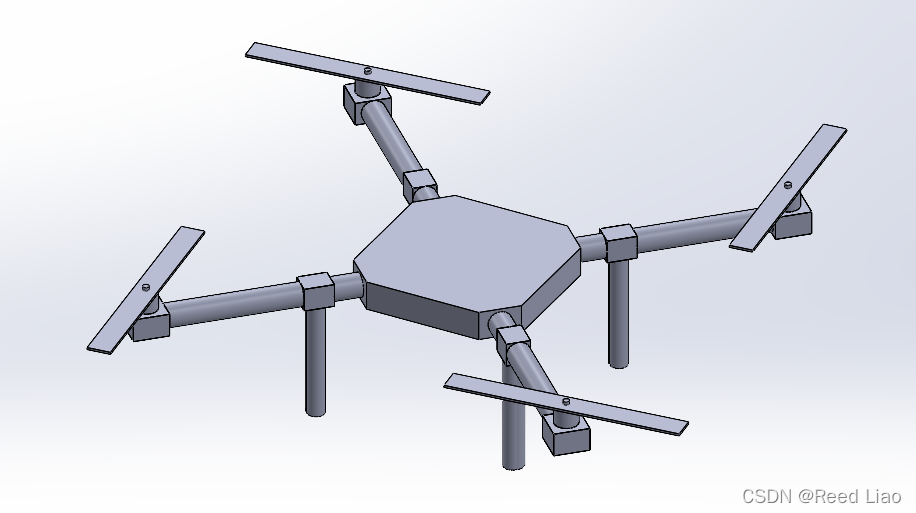
【rosgazebo】多旋翼无人机仿真(三)——自定义多旋翼模型
图片尺寸916x513
ubuntu安装ros和gazebo之发行版对应关系ubunturosgazebodistribution
图片尺寸2118x2106
ros史话36篇23ros之gazebo
图片尺寸503x353
ros2gazebo仿真入门
图片尺寸1235x787
从零开始仿真ros小车二在gazebo中显示小车模型
图片尺寸1244x802
带碰撞检测的机械臂运动规划测试(gazebo界面)
图片尺寸720x405
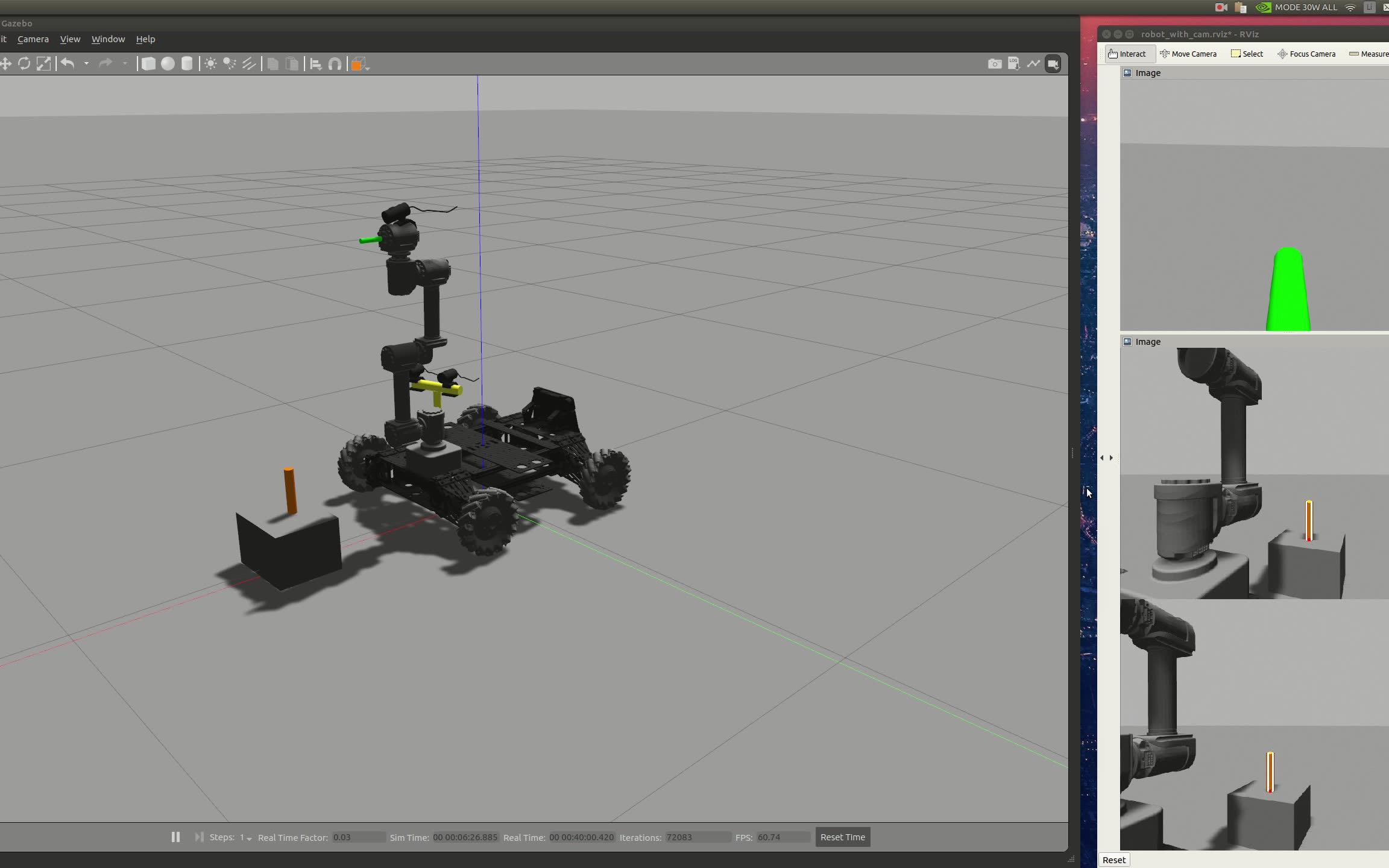
从零开始的ros四轴机械臂控制三为机械臂添加摄像头和夹爪解决gazebo
图片尺寸2560x1400
ros入门三gazebo详解
图片尺寸1853x1053
rosgazebo专题二gazebo的使用上
图片尺寸1855x1056
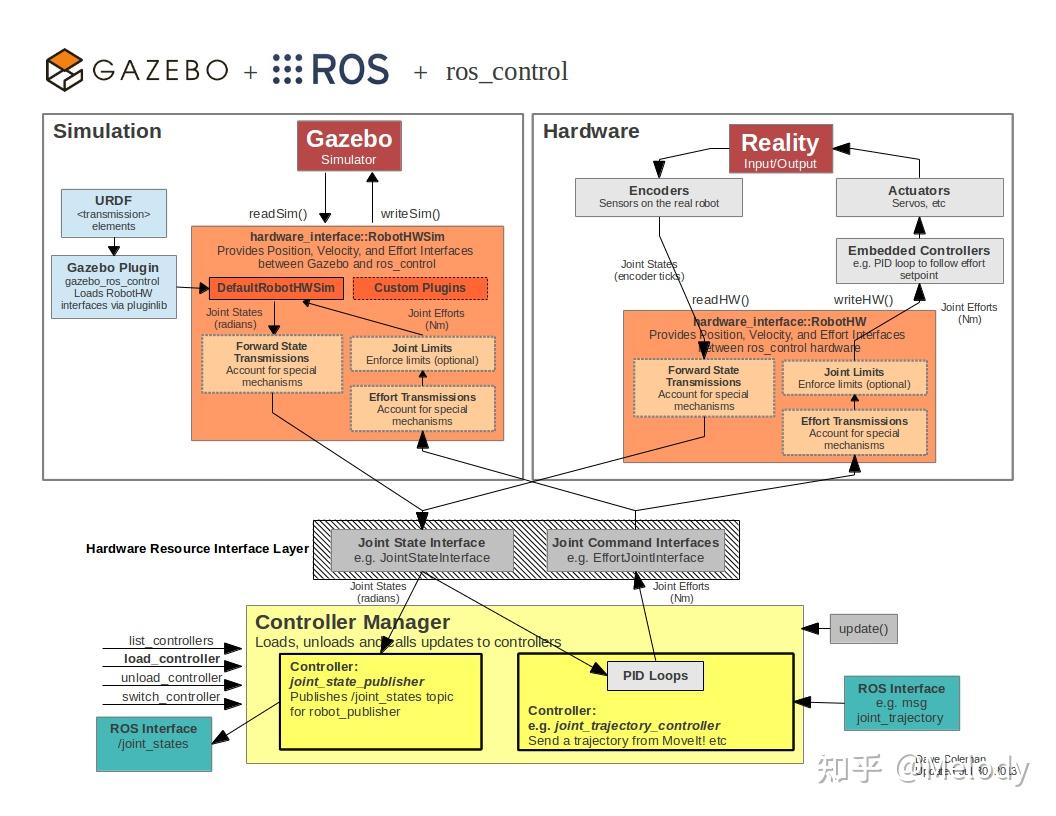
ros入门八gazeboroscontrol
图片尺寸1056x816
在ros_gazebo中搭建移动机械臂仿真平台_哔哩哔哩_bilibili
图片尺寸2304x1440
rosmoveit机械臂控制探索2moveit与gazebo联合仿真方法
图片尺寸1920x1080
rosgazebo相机雷达联合标定
图片尺寸1920x1079
sdf是什么文件rosgazebosdf机器人描述格式解析
图片尺寸720x403
gazebo ros入门
图片尺寸1008x729