rosmelodic

04 lts安装ros melodic版机器人操作系统(2019年10月更新moveit! 1.
图片尺寸650x639
rosmelodic控制真实机械臂之urdf模型生成
图片尺寸1372x907
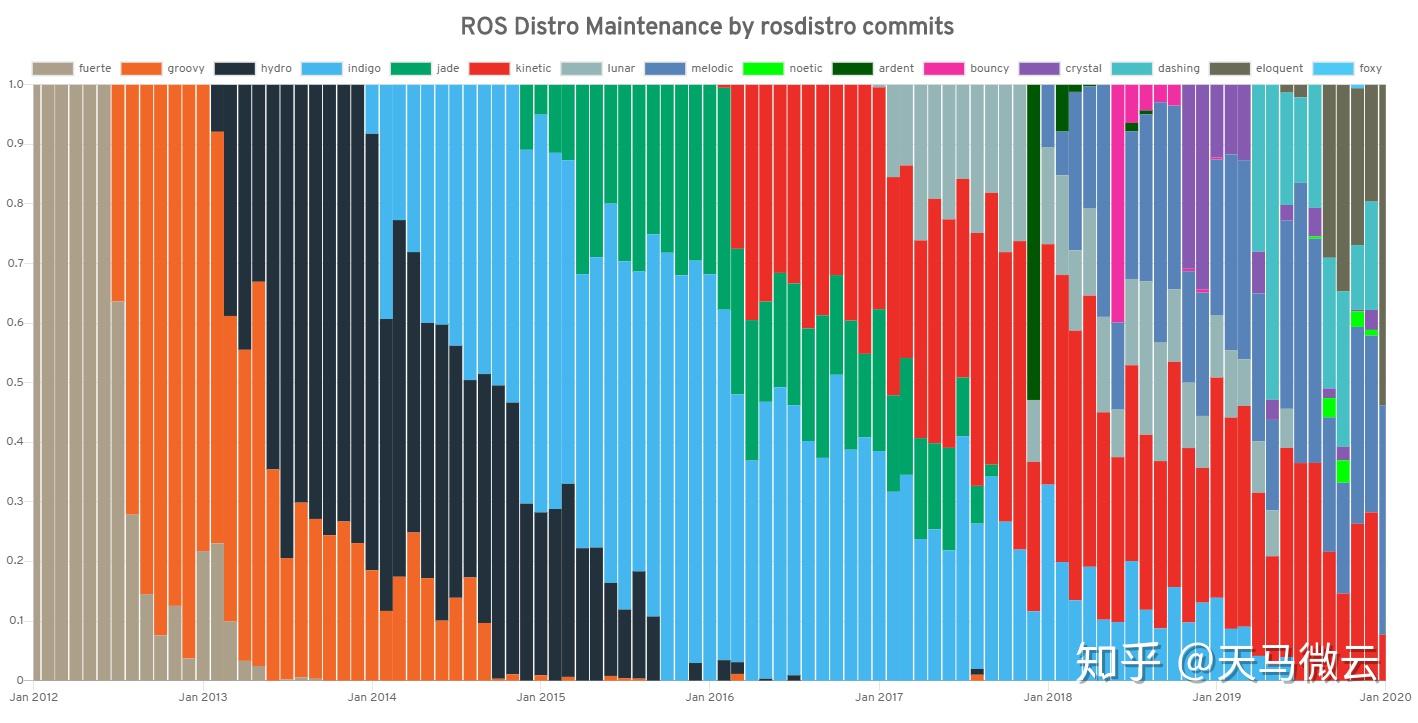
随着ros melodic的进一步稳定,osrf在ros上的开发会减少,并将更多的有
图片尺寸1418x723
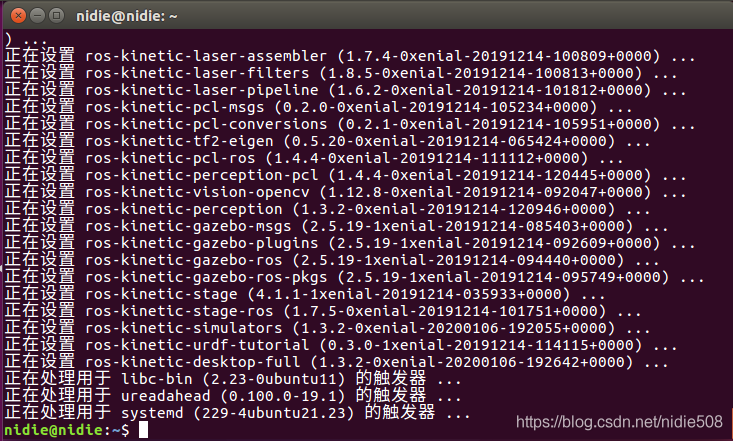
04 melodic ros 安装记录
图片尺寸2560x1920
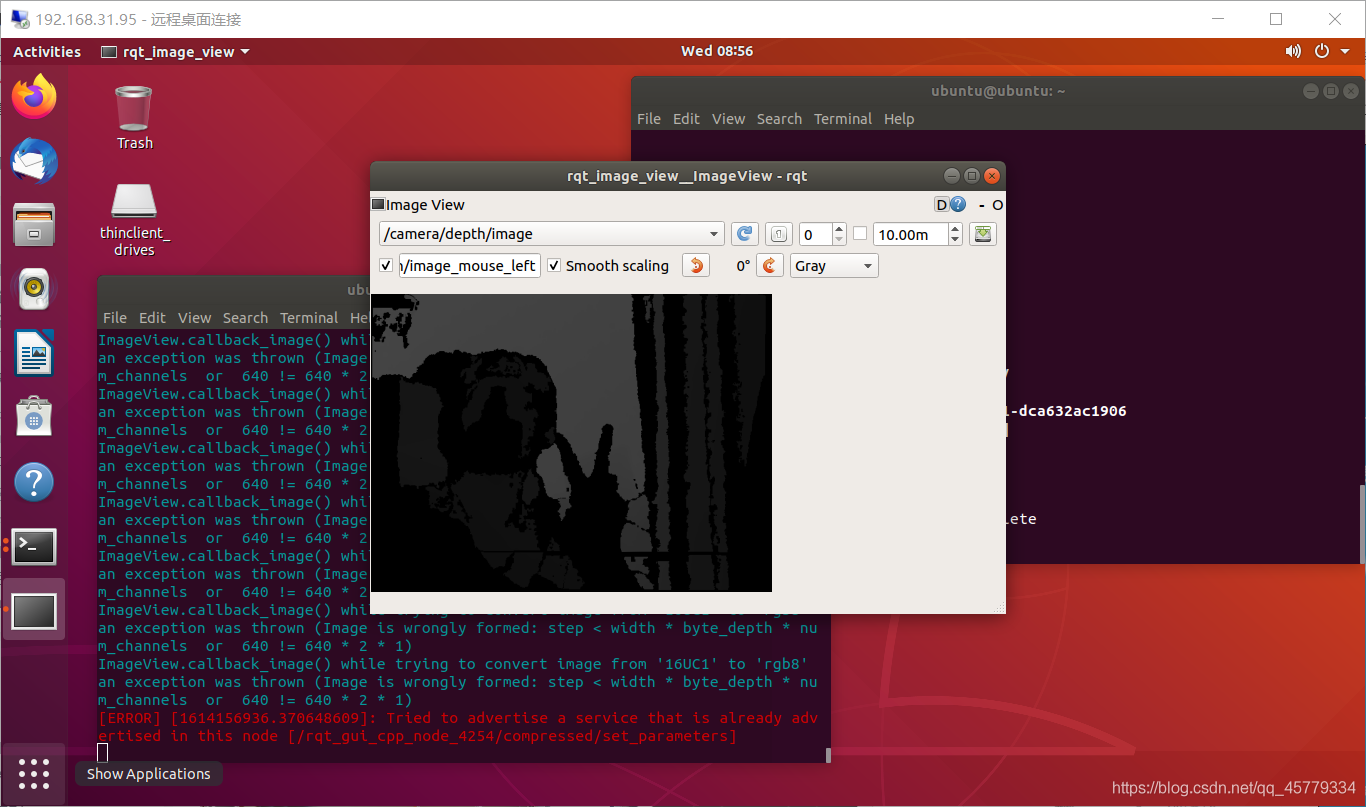
sudo apt install ros-melodic-realsense2-camerasudo apt install
图片尺寸1861x1053
jetson nano(7)-- 在jetson nano上安装ros melodic for ubuntu18.04
图片尺寸1466x826
ros安装详细教程 问题解决
图片尺寸733x441
ubuntu1804安装ros最新最详细亲测
图片尺寸1853x1053
04ros melodic如有需要安装可以参考教程:树莓派4b——ubuntu 18.04.
图片尺寸1366x807
04安装ros melodic 以及测试rviz如果安装了ros melodic,没有创建ros
图片尺寸950x568
移植yolov4到ros melodic
图片尺寸600x600
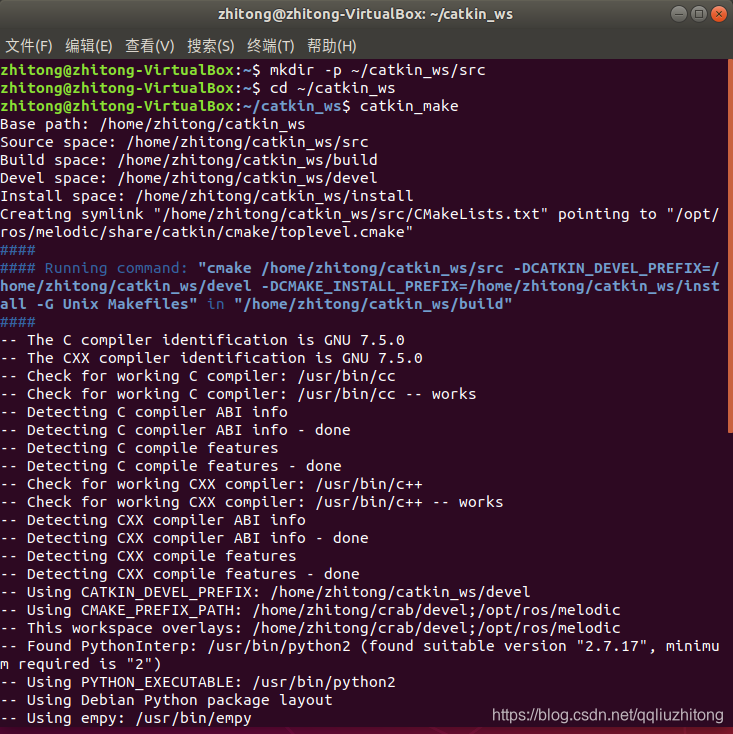
ros创建工作空间功能包
图片尺寸733x734
04安装ros melodic(带图及代码详细教程2022.10.10) - 知乎
图片尺寸1024x695
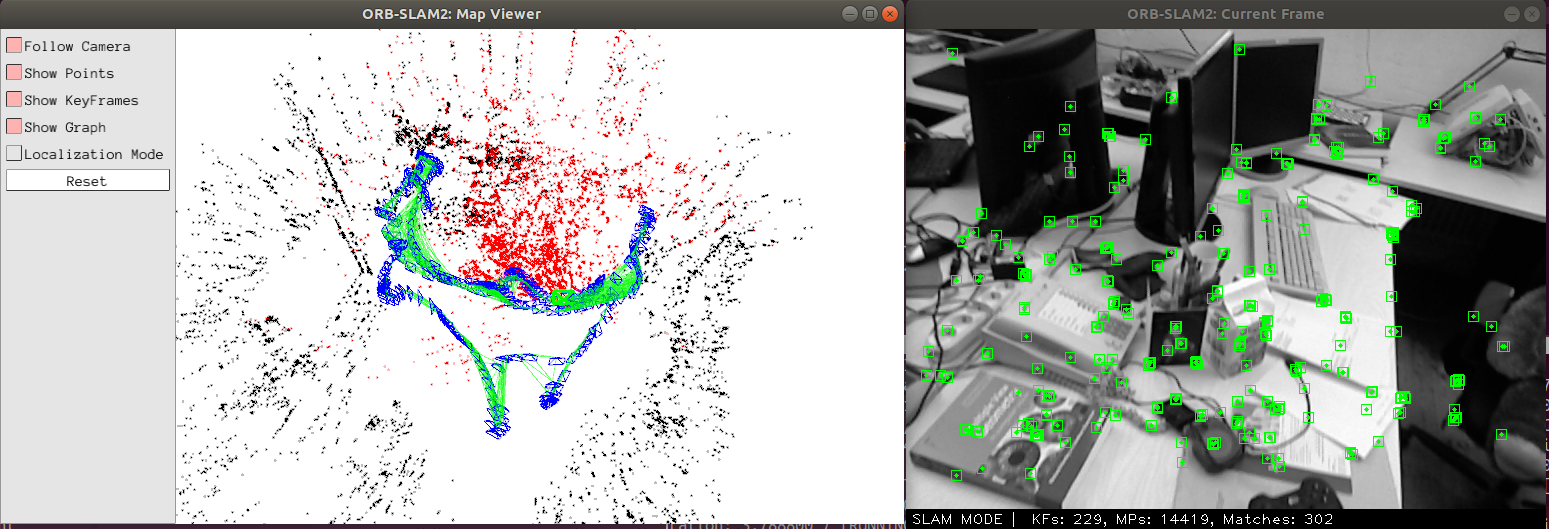
04系统ros melodic 安装orbslam2,astra相机的ros环境
图片尺寸1549x529
应用场景ros kinetic,melodic,c ,python,rviz和urdf支持驱动程序和
图片尺寸1008x564
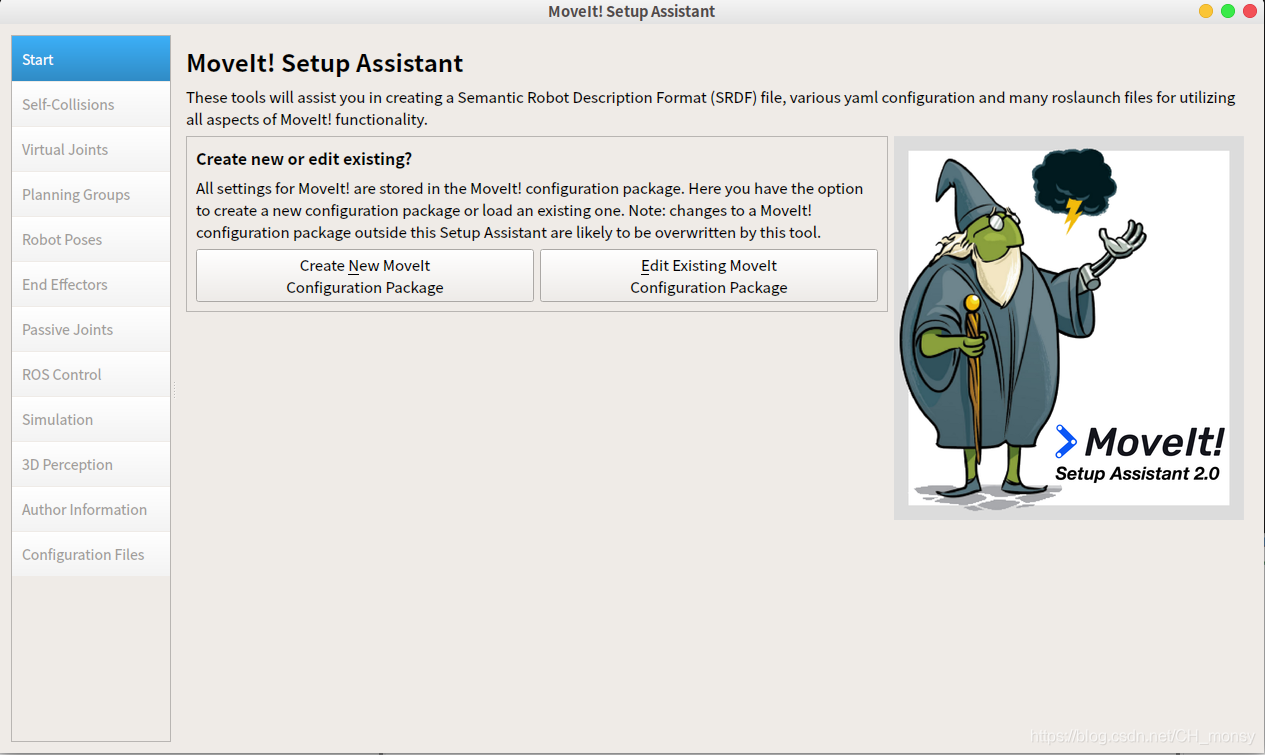
ubuntu1804rosmelodic安装moveit框架
图片尺寸1265x755
04安装ros melodic
图片尺寸3192x3231
apt-get install ros-melodic-rosbridge-server sudo apt-get
图片尺寸911x428
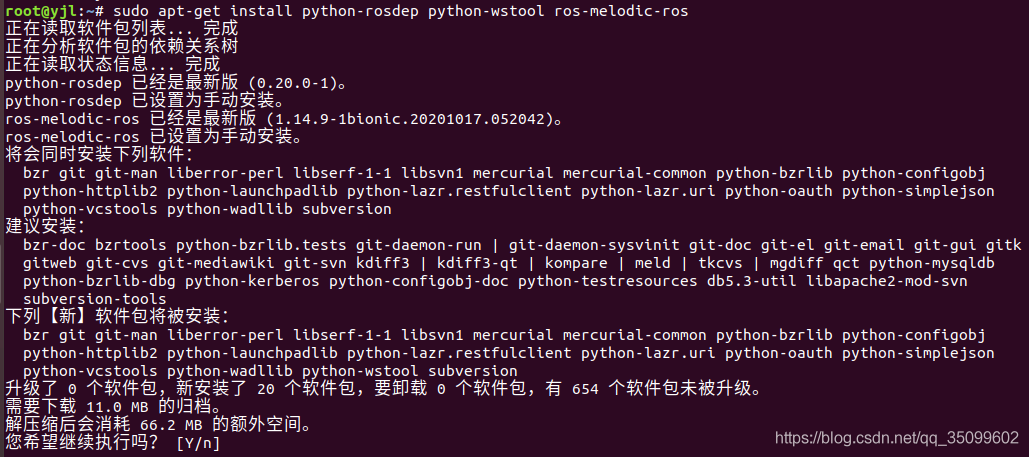
ubuntu1804安装rosmelodic流程及出错解决搬砖
图片尺寸1029x457
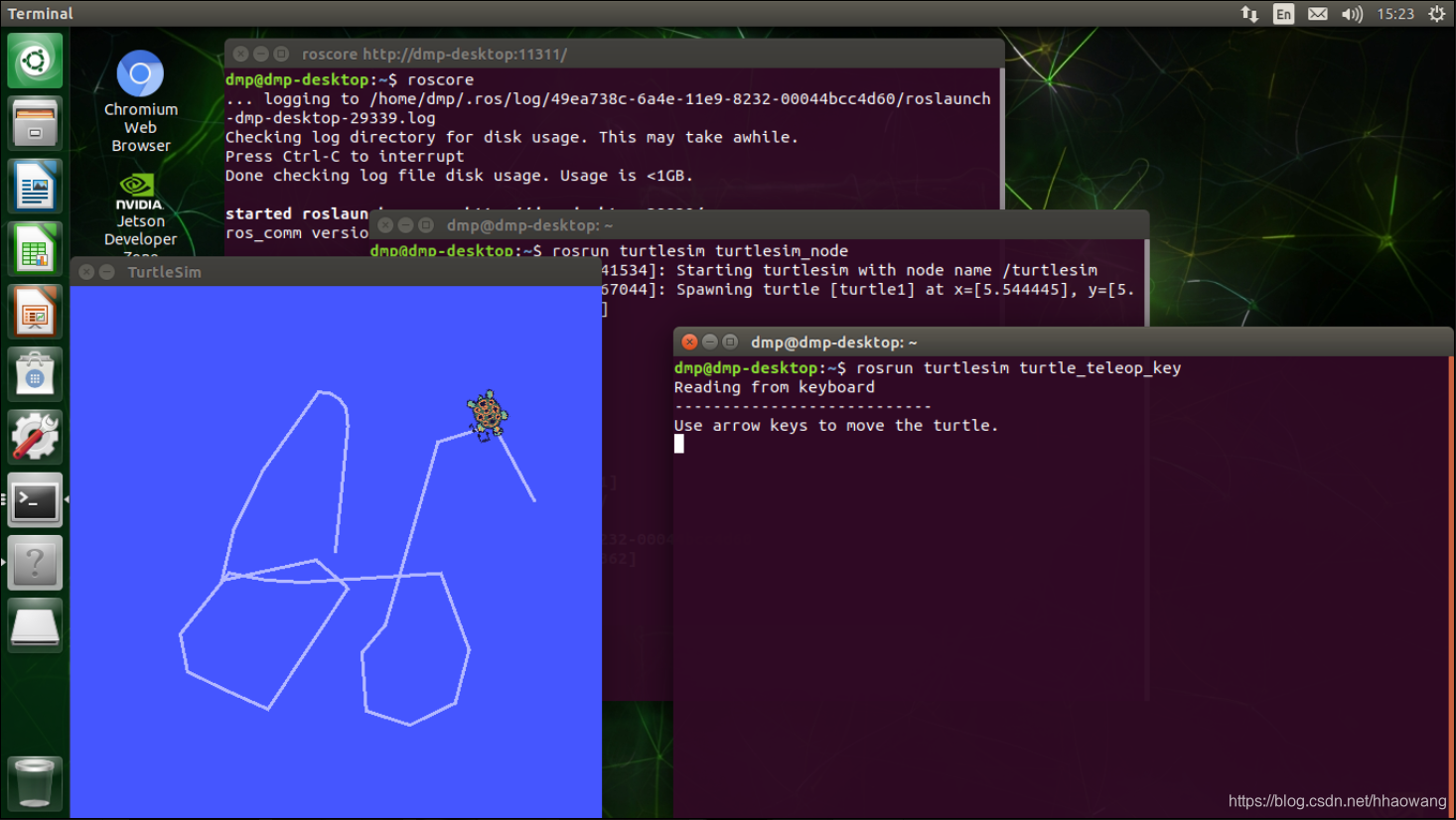
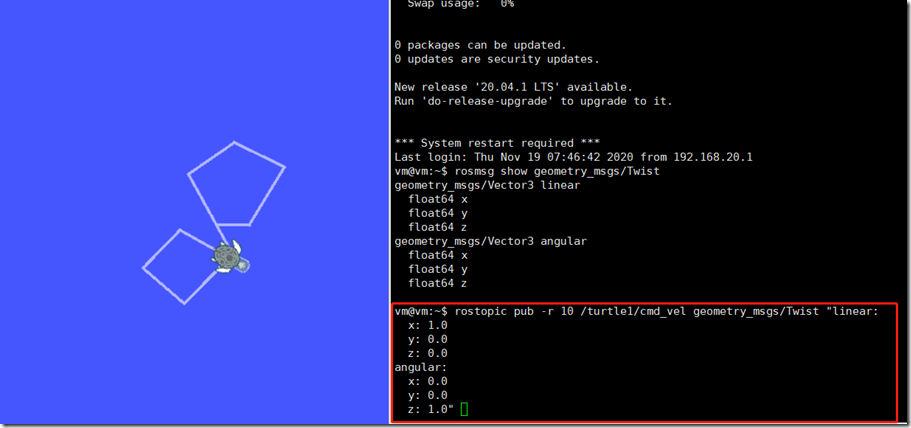
ubuntu18.04安装ros melodic并演示小海龟例子(解决软件依赖性问题!
图片尺寸948x426