scara机器人运动简图

机器人运动简图
图片尺寸640x479
一种双足步行机器人
图片尺寸1619x2499
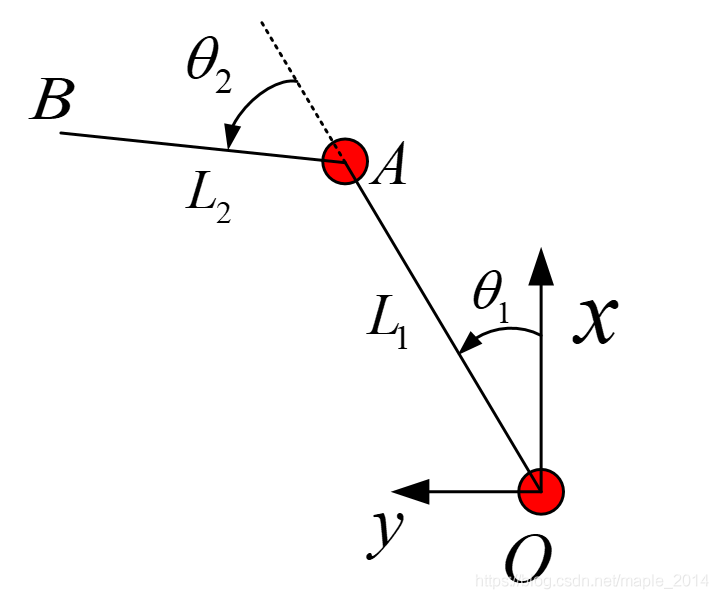
scara机器人运动学分析--matlab_scara机器人机构简图-csdn博客
图片尺寸933x663
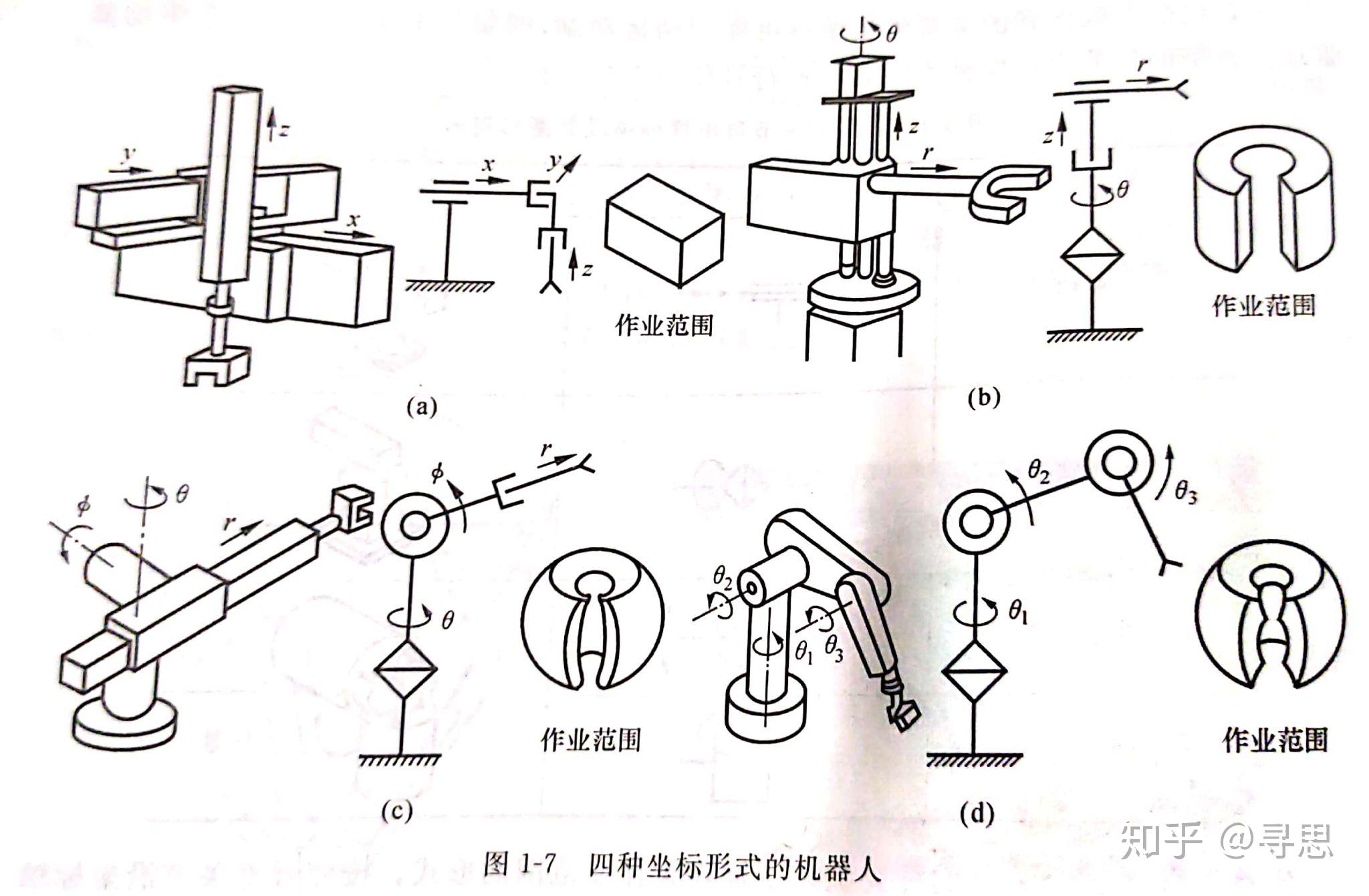
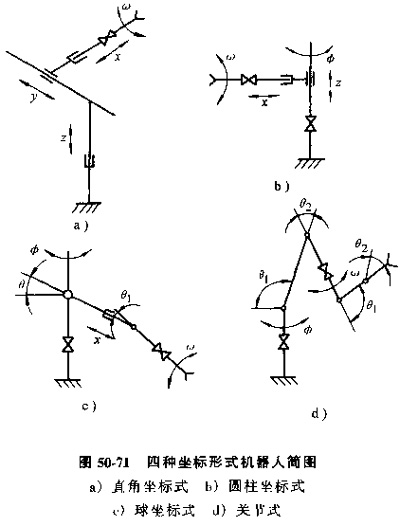
32 几种常用坐标型机器人机构简图(a)直角坐标型; (b) 圆柱坐标型; (c
图片尺寸454x452
机器人运动学
图片尺寸600x450
基于模型预测控制的磨削机器人末端力跟踪控制算法
图片尺寸700x657
对于如图所示的scara型机器人建立dh法的坐标系填写dh法参数表
图片尺寸462x418
接下来我们具体来看看二足机器人是如何保持其自身的平衡以及完成运动
图片尺寸533x726
搬运机器人
图片尺寸400x526
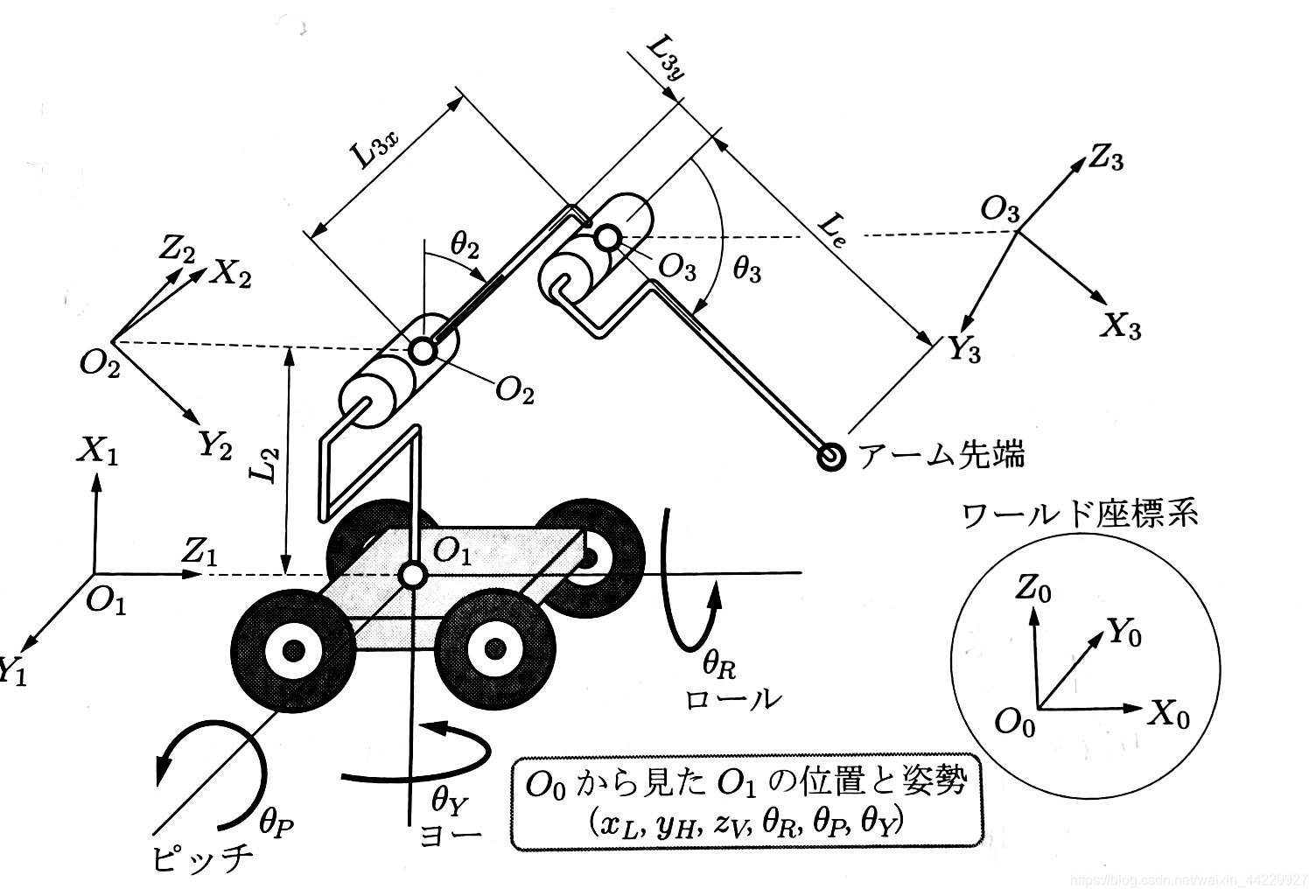
机器人学机器人运动学力学与控制极简说明
图片尺寸1504x1024
关于scara机器人正运动学的疑惑?
图片尺寸600x496
amber机器人公司受邀参加第二届康复与辅助技术论坛
图片尺寸640x717
四轴scara机械手控制系统解决方案
图片尺寸441x401
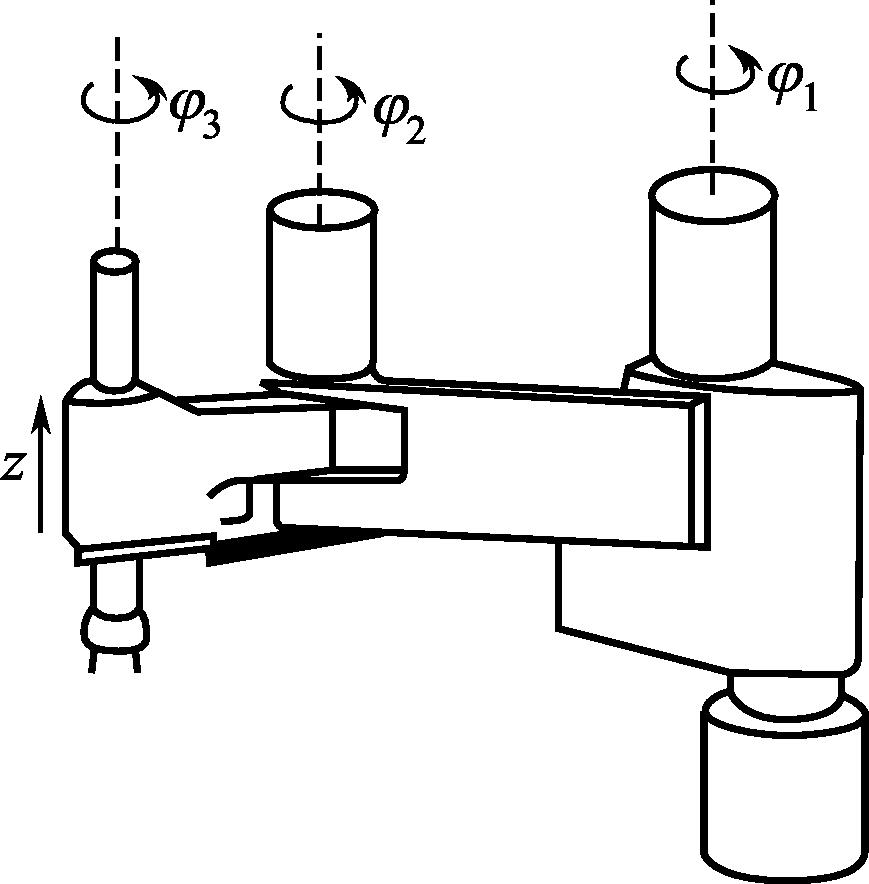
机器人
图片尺寸869x884
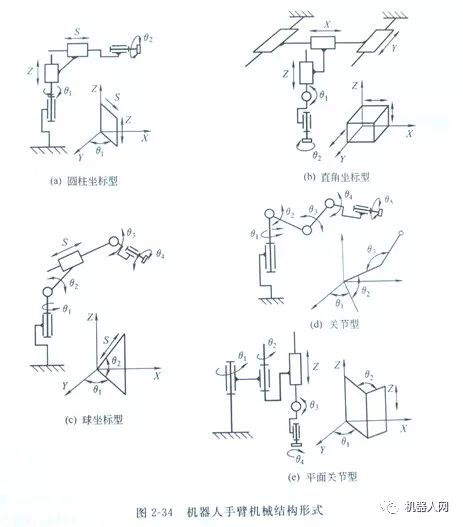
机器人分为直角坐标型,圆柱坐标型,球(极)坐标型,关节坐标型和scara型
图片尺寸2048x1341
绘制scara机器人工作空间
图片尺寸718x599
六自由度机器人机械臂运动学建模及运动规划系列四轨迹规划
图片尺寸403x234
一种仿青蛙两栖机器人及运动控制方法
图片尺寸805x1000
2康复与代步机器人运动学结构简图 人体下肢单腿自由度分布为:髋关节3
图片尺寸1654x1233
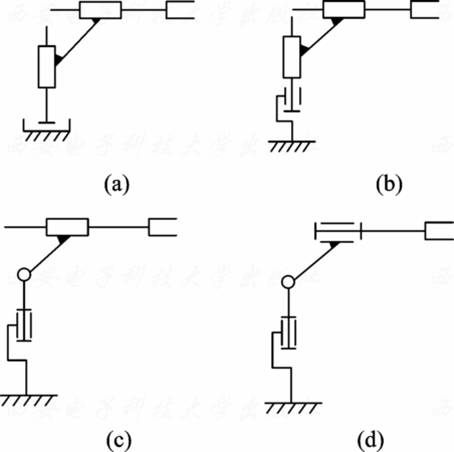
补课|| 机器人手臂的典型机构
图片尺寸463x527









.jpg)