slam 建图

hdl_graph_slam
图片尺寸638x512
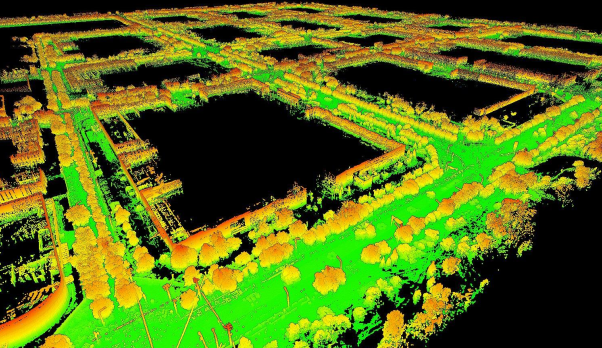
激光slam城市大场景鲁棒建图
图片尺寸602x348
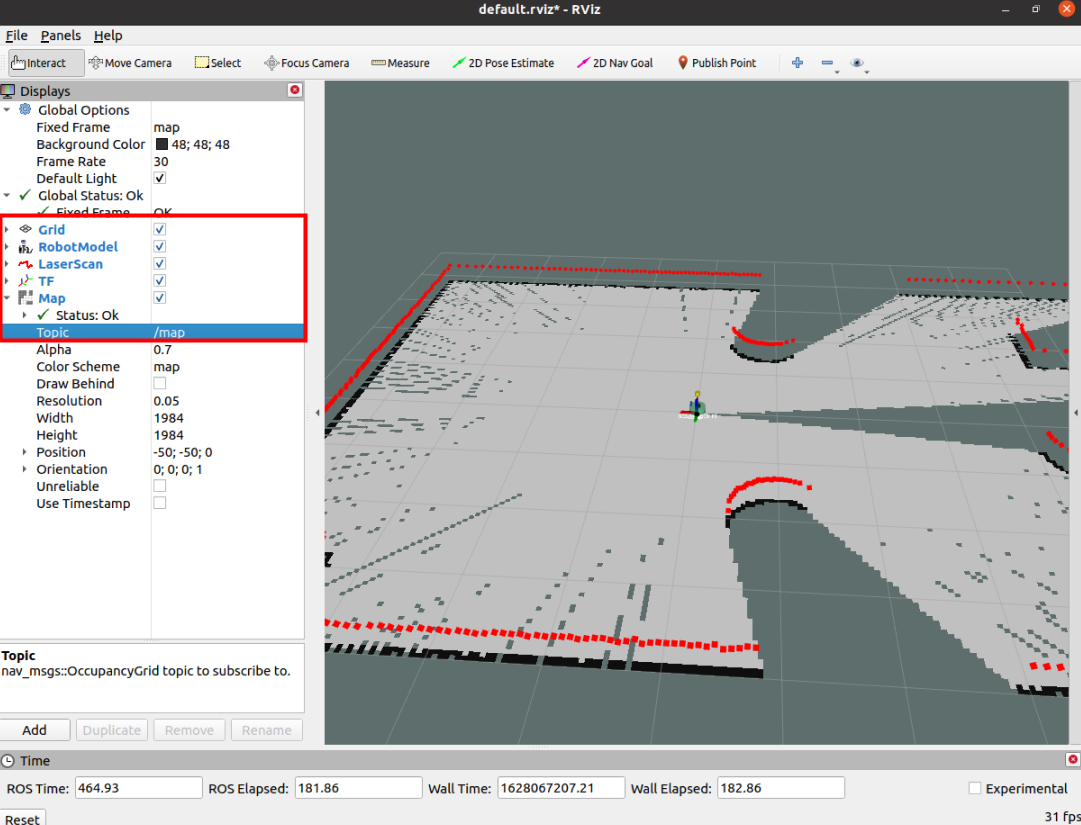
turtlebot3slam创建地图及navigation导航
图片尺寸1366x768
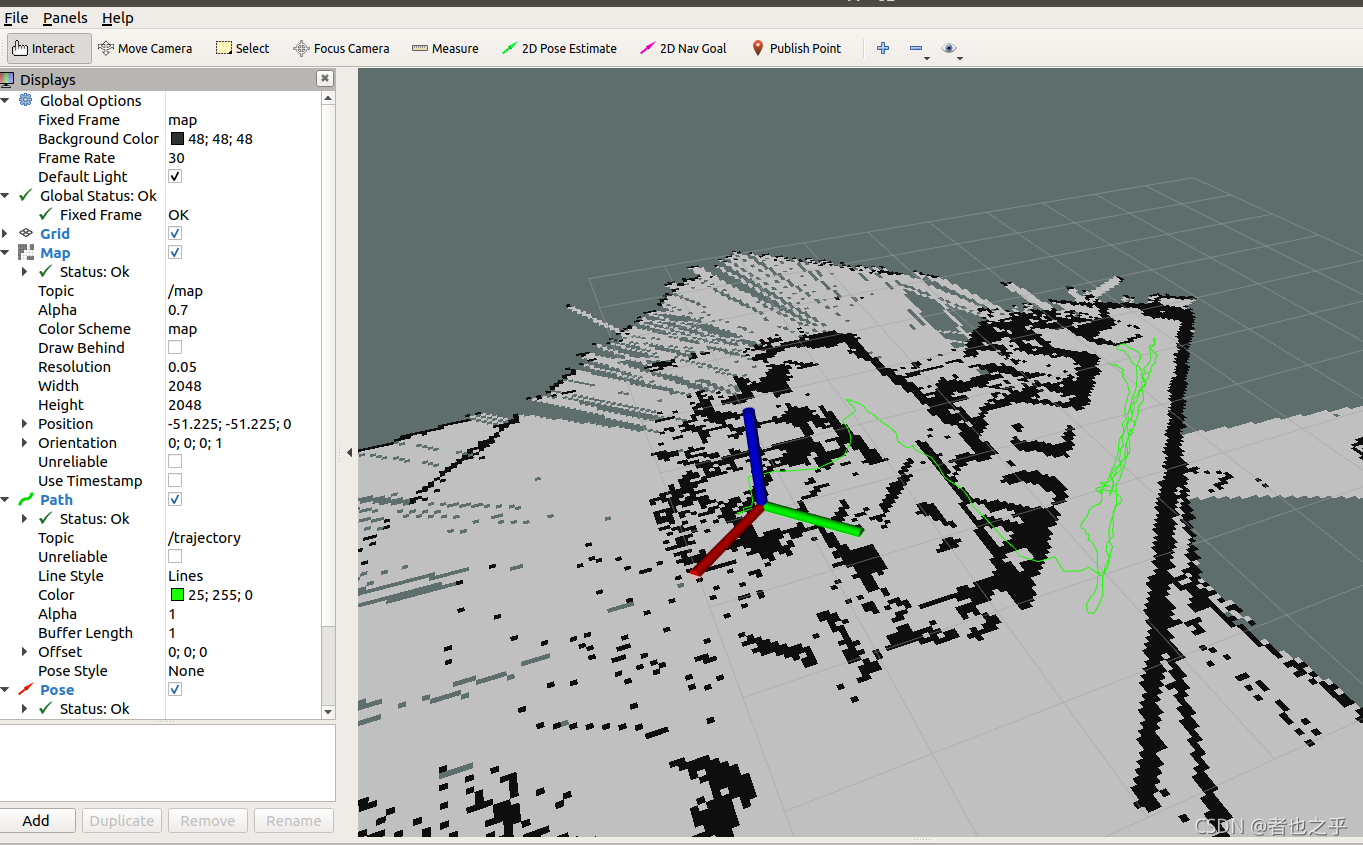
机器人导航仿真一slam建图
图片尺寸1081x825
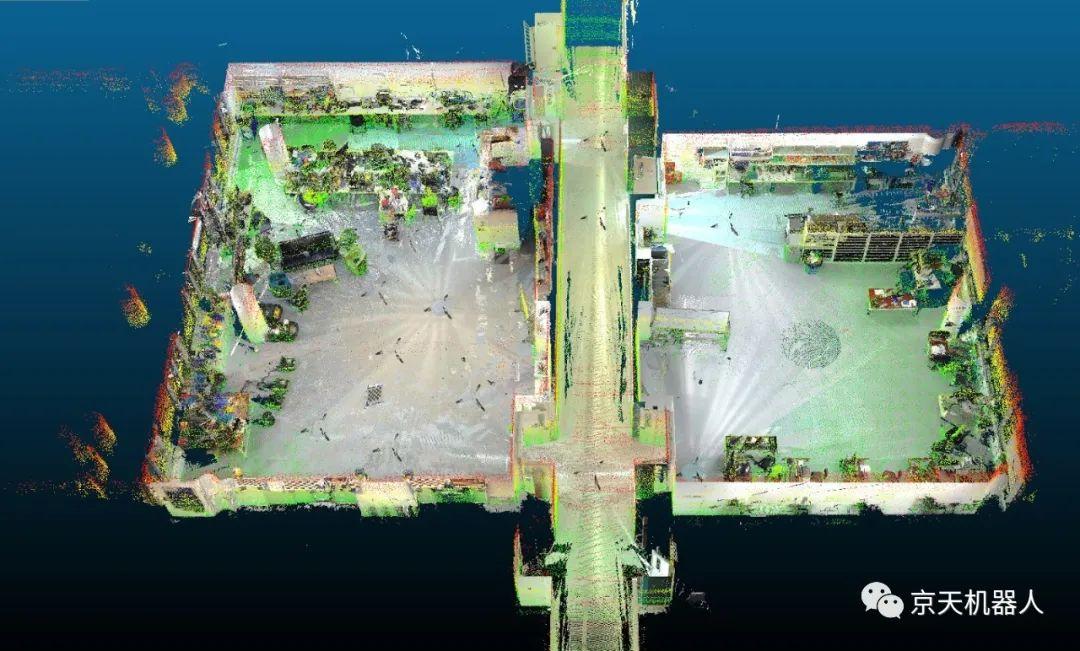
激光slam技术建图
图片尺寸600x400
自动驾驶系列(五)hector_slam建地图_激光雷达heterslam建图-csdn博客
图片尺寸1363x845
使用数据包实现orbslam2效果图
图片尺寸800x600
机器人导航仿真一slam建图
图片尺寸1198x846
上海科技大学通过clearpath无人车采集高分辨率数据集推动slam研究
图片尺寸1080x651
机器人导航仿真一slam建图
图片尺寸1066x774
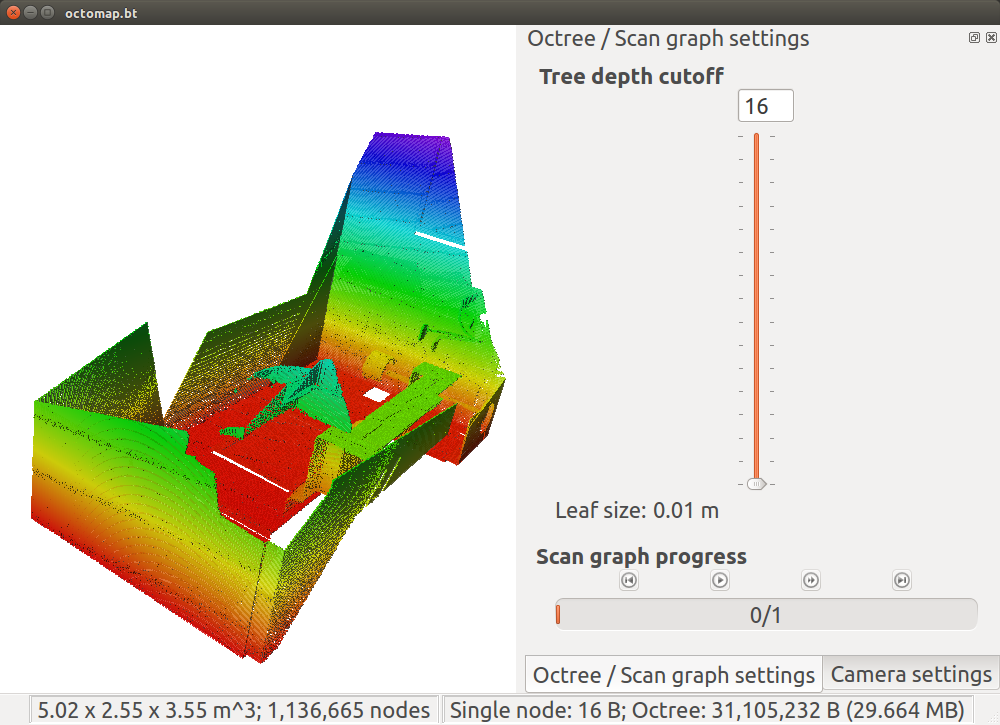
使用orbslam2进行kineticv2稠密建图实时转octomap建图以及导航
图片尺寸1581x803
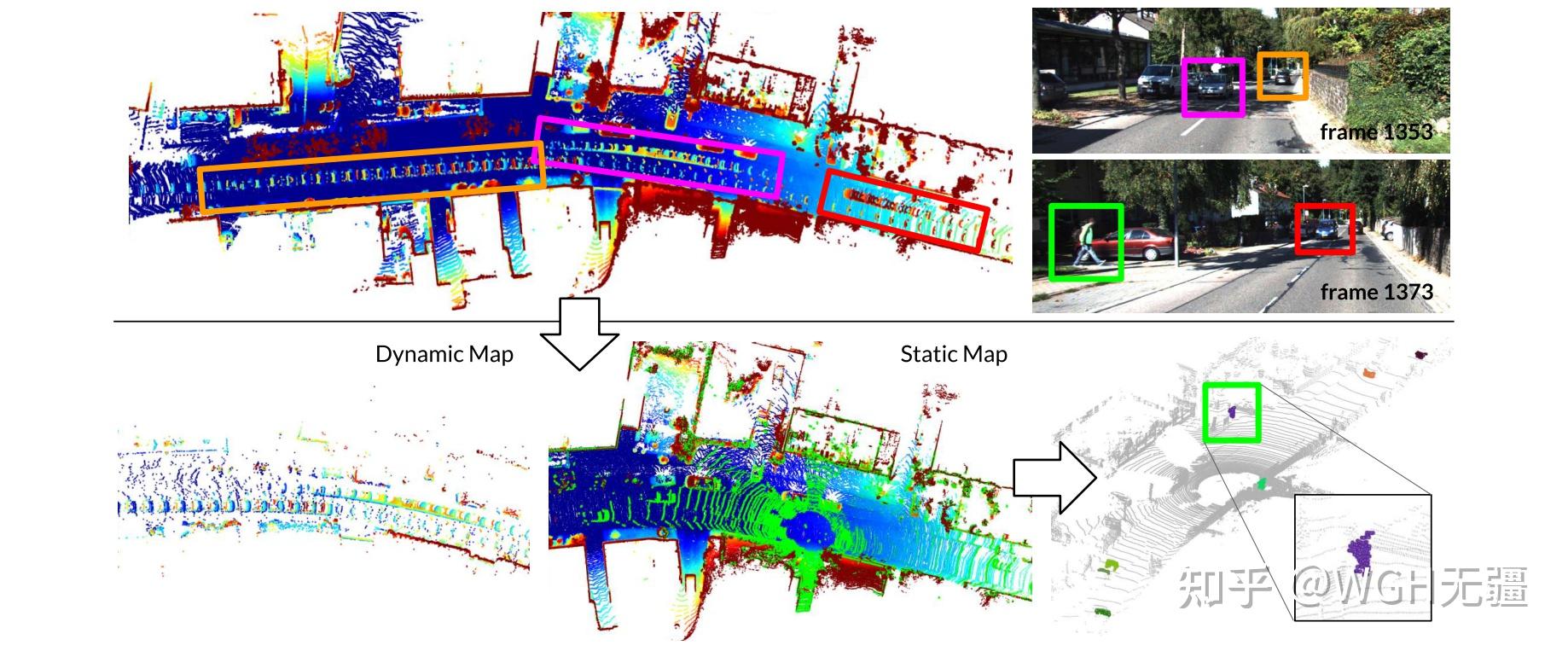
动态环境slam专题四思考框架
图片尺寸1838x763
第九章机器人slam建图课后作业
图片尺寸2200x934
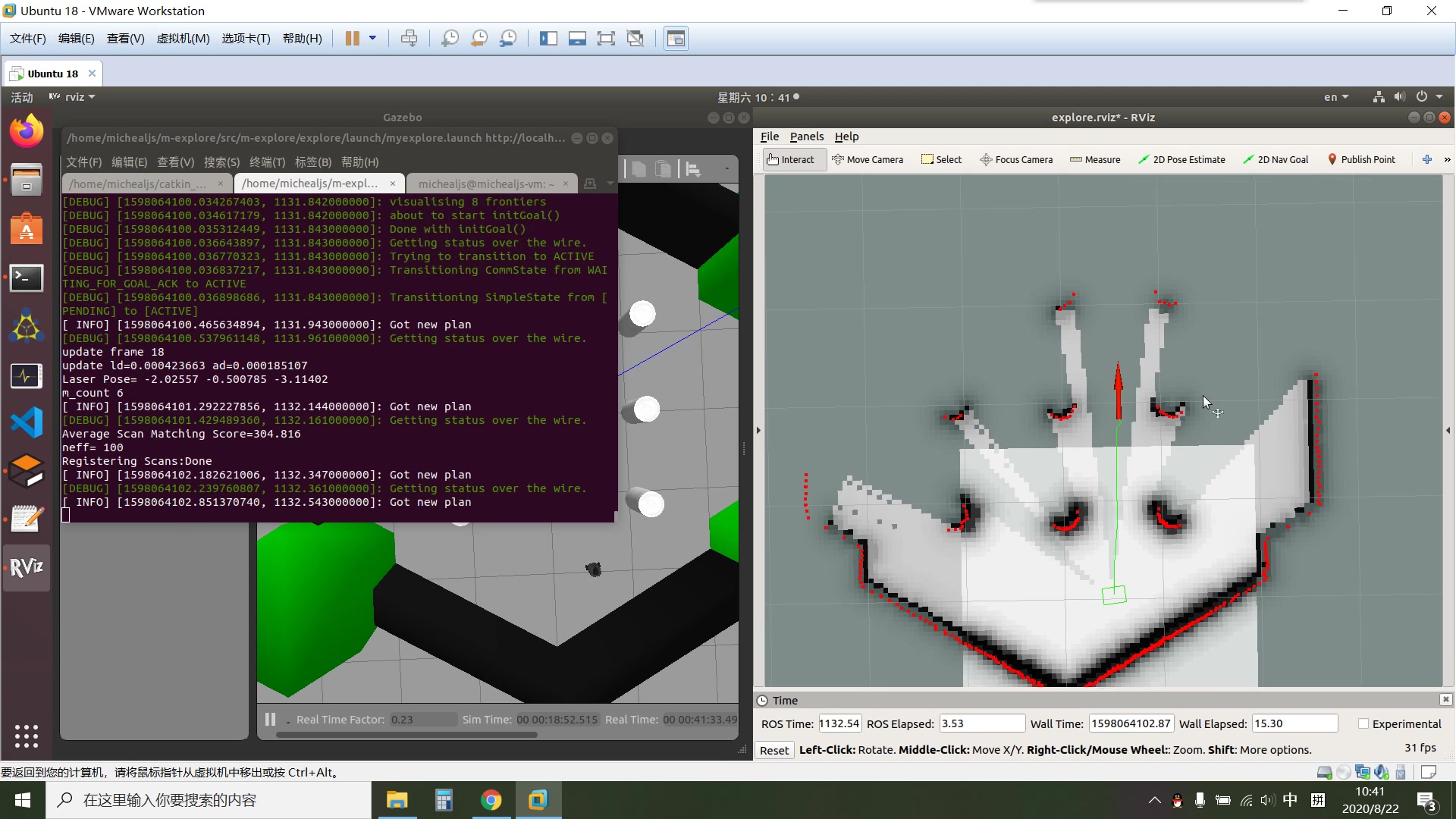
自动slam建图——基于ros,使用turtlebot3仿真
图片尺寸1920x1080
第九章机器人slam建图课后作业
图片尺寸2103x1132
ros学习笔记之导航实现01_slam建图 – 源码巴士
图片尺寸1261x864
重读视觉slam十四讲ch12建图
图片尺寸1000x725
视觉slam14讲
图片尺寸749x495
疑难杂症篇十八ros系统中使用slam算法建图时出现地图漂移的几种原因
图片尺寸1719x883
lk分享 | 高精地图构建与slam感知优化建图策略
图片尺寸560x372